PICO团队发布XR机器人远程操作框架XRoboToolkit

这是一套基于OpenXR标准的跨平台XR机器人远程操作框架
(映维网Nweon 2025年08月14日)日前,PICO团队亮相了自研的XRoboToolkit。这是一套基于OpenXR标准的跨平台XR机器人远程操作框架,面向全球开发者与研究机构开放。

◐ 打通XR与机器人世界
XRoboToolkit针对现有机器人遥操作方案存在的配置复杂、延迟高、可扩展性不足等问题,提供了统一的跨平台解决思路:
XR端:遵循OpenXR规范,支持包括PICO4Ultra在内的多款头显设备,集成立体视觉低延迟回传、多模态追踪(头部、手柄、手势、全身、外部追踪器)等能力。
机器人端:提供Python/C++模块化接口,支持真实机器人与MuJoCo等仿真平台的无缝集成,覆盖机械臂、移动平台与灵巧手等多种形态。
◐ 核心亮点
-
沉浸式低延迟体验:定制视频流与通信协议,PICO4Ultra在端到端立体视频回传中表现优异,延迟低于100ms,相比部分现有方案大幅降低眩晕感,提升机器人遥操用户体验。
-
精确操控能力:优化型QP逆运动学求解器,确保机械臂在复杂工况下的平稳控制;灵巧手重定向算法可将XR手势数据映射到机器人手,实现细致抓取与操作。
-
丰富控制模式:支持双手柄操控、手势识别、全身追踪及肘部追踪器辅助冗余臂控制,覆盖从精密装配到移动操作臂等多种任务场景。
-
数据采集与AI训练:可直接用于采集高质量机器人示范数据,已验证可助力Vision-Language-Action模型微调并在实际任务中取得100%成功率。
◐ 广泛应用验证
在实际测试中,XRoboToolkit已成功应用于:
-
高精度遥操任务:如双臂地毯折叠、双臂毫米级容差的装配操作;
-
移动平台操控:基于摇杆的全向底盘控制;
-
仿真灵巧手操作:利用头显手势数据直接驱动虚拟手做精细示范动作。
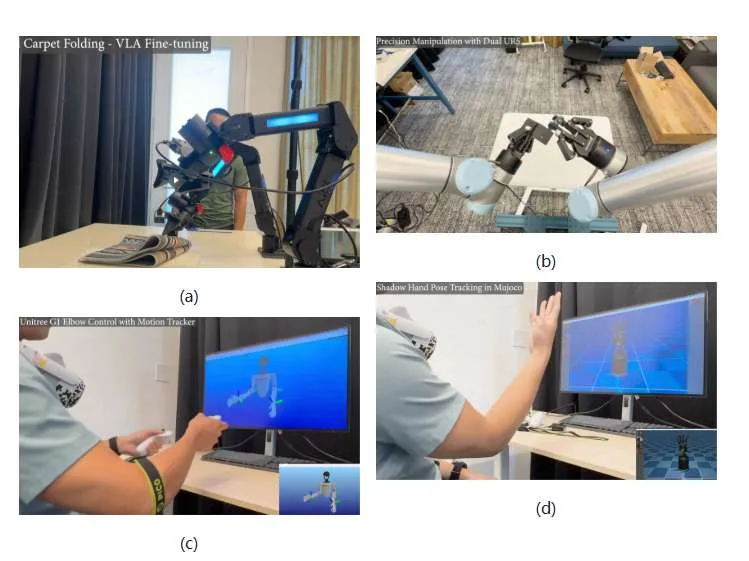
XRoboToolkit的应用示例:(a)通过遥操作机械臂叠地毯并收集数据,可训练出让机械臂自主完成该操作的Vision-Language-Action模型。(b)UR5双臂的精细操作。(c)利用PICO体感追踪器增强对宇树G1机器人手肘的精确操控。(d)利用手势追踪对Shadow机械手在MuJoCo中的仿真控制。
◐ 面向开发者开放
XRoboToolkit项目已全面开放,开发者可以访问项目主页https://xr-robotics.github.io/查看介绍,技术论文,和开源代码等内容。PICO将持续推动该框架的跨平台兼容性和标准化工作,包括:
-
扩展对更多仿真平台和机器人硬件的支持;
-
增加机器端自定义数据回传支持;
-
持续增强和扩展对灵巧手和其他外设的支持;
-
推进OpenXR在全身追踪等能力上的统一标准。
视频演示:
如有问题,反馈,评论和合作探讨,欢迎直接联系项目负责人:
-
荆可(ke.jing@bytedance.com)
-
杨宁(ning.yang@bytedance.com)
团队总结道:“期待和你一起,推动XR和具身智能应用的未来。”










