香港城市大学研发BLE与UWB辅助AR同步技术

通过位置信标技术(即低功耗蓝牙BLE和超宽带UWB)实现AR同步解决方案
(映维网Nweon 2025年07月21日)跨会话/设备同步增强现实存在挑战。在一项研究中,香港城市团队大学团队提出利用位置信标技术(即低功耗蓝牙BLE和超宽带UWB)实现AR同步解决方案,以讨论现有AR系统中的可扩展性问题和不一致性。
相关框架分为两种方法:BLE辅助和WEB辅助AR同步。BLE辅助方法利用iBeacon技术进行房间环境识别,并与苹果的ARKit ARWorldMap和谷歌的ARCore Cloud Anchors相结合。UWB辅助解决方案采用精确的信标测距功能与设备的方位角融合,在AR会话/设备中建立固定的空间参考。
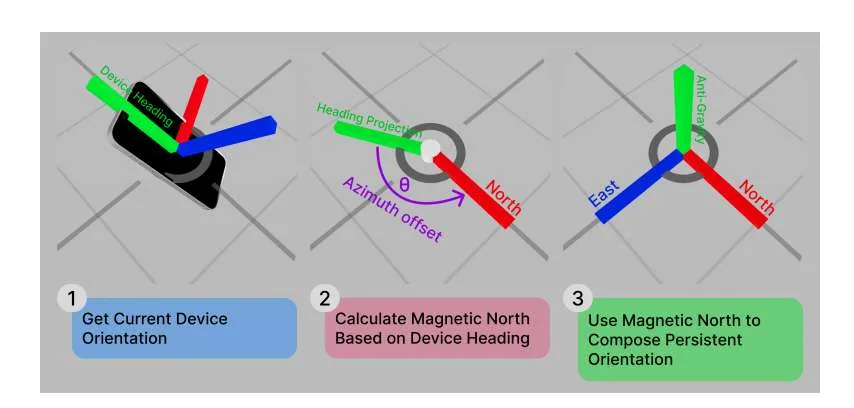
对比评估表明,UWB辅助方法在各种环境变化的可靠性方面优于BLE辅助方法,因为无论物理环境如何变化,UWB辅助方法都能成功解决虚拟锚点问题。然而,BLE辅助实现在解析虚拟锚点时往往更准确,位置误差平均为0.02米,方向误差在0.03弧度以内。在UWB辅助方法中,计算的固定空间参考的平均视差为0.04米,姿态为0.11弧度。UWB辅助方法是理想的场景,需要持续成功的定位和可接受的精度。相比之下,BLE辅助方法更适合在环境改变时要求更高精度的虚拟锚位和性能权衡,例如用于目标短期AR会话。
......(全文 2407 字,剩余 1979 字)











