荷兰团队研发柔性触觉指环:XR交互准确率达90%,支持多模态纹理模拟

触觉指环
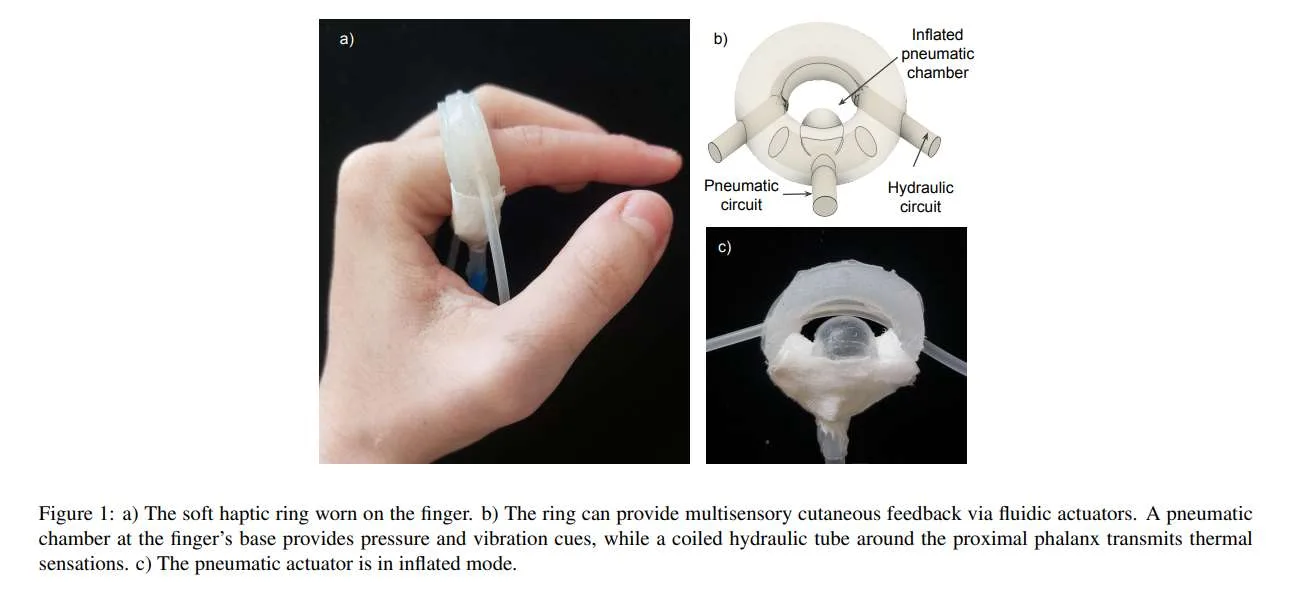
(映维网Nweon 2025年07月03日)XR技术的日益普及推动了对可穿戴触觉反馈技术的需求。然而,大多数现有的可穿戴触觉技术只能在有限的触觉模式下传递感觉。针对这个问题,荷兰代尔夫特理工大学团队介绍了一个柔性触觉指环和数据驱动的渲染方法来产生多模态纹理感觉。
设备集成了气动和液压驱动,以模拟近端指骨的粗糙度、热和柔软度,使用户能够用指尖自然地探索周围环境。渲染方法根据用户的探索行为动态地调整提示。研究人员通过对15名参与者进行用户研究来验证方法,并将指环产生的六种虚拟纹理与真实纹理相匹配,并对他们的感知感觉进行评级。参与者的纹理匹配准确率达到90%。形容词评级证实,指环提供了独特的,感知丰富的刺激。相关发现突出了指环在沉浸式XR应用中的潜力,在不限制物理交互的情况下提供多样化的触觉反馈。
我们对周围环境的触觉体验深刻地塑造了我们对世界的理解。通过触摸,我们可以精确地解释物体的物理特性并操纵物体。但在数字环境中,丰富的触觉交互并不存在。在过去的十年中,可穿戴触觉设备引起了学术界和工业界的特别关注,目标是通过佩戴在身体的机电元件来模拟自然触觉线索。
......(全文 2390 字,剩余 1942 字)








