山东大学联合团队提出高效维纳滤波器提升动态点云压缩质量

基于高效率维纳滤波的点云质量增强
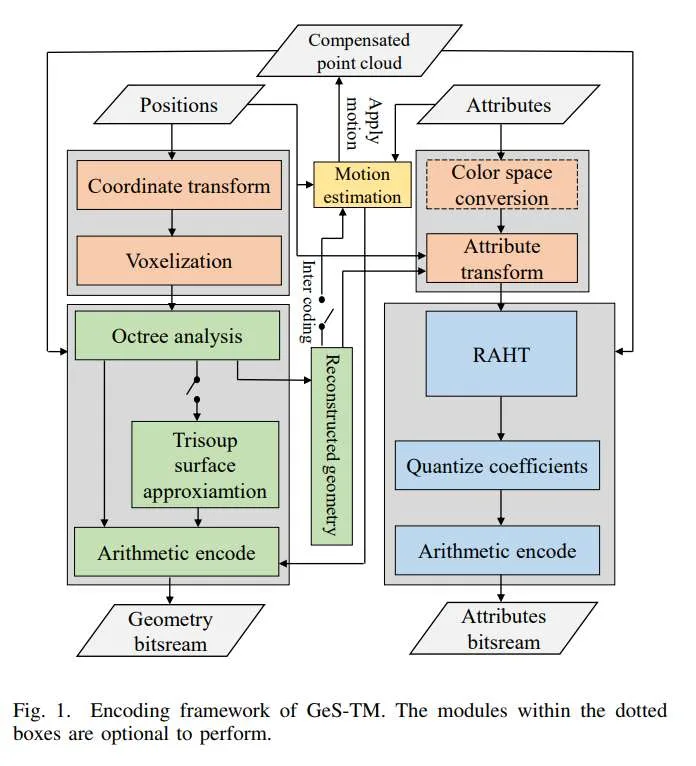
(映维网Nweon 2025年07月02日)点云是一组精确描述物体或场景表面的几何形状和相应属性的点。它可以广泛应用于虚拟现实等领域。但是,它的数据量非常大,对当前的网络带宽和存储容量提出了挑战。有效的点云压缩对于解决这一挑战以及增强实时处理能力至关重要。近年来,专家组正在为静态点云和动态点云建立基于几何的点云压缩(G-PCC)标准。G-PCC的有损压缩尽管可以获得很高的压缩比,但重建质量相对较低,特别是在低比特率下。
为了解决这个问题,山东大学,烟台大学和上海大学团队提出了一种高效的维纳滤波器。它可以集成到G-PCC的编码器和解码器管道中,以提高动态点云的重建质量和率失真性能。具体来说,他们首先提出了一个基本的维纳滤波器,然后通过引入系数继承和基于方差的Luma分量点分类对其进行改进。
另外,为了降低维纳滤波器应用过程中最近邻搜索的复杂度,团队同时提出了一种基于莫顿编码的快速最近邻搜索算法,以实现滤波器系数的高效计算。实验结果表明,与最新的G-PCC编码平台相比,所述解决方案在无损几何属性配置条件下,Luma、Chroma Cb和Chroma Cr的平均Bjøntegaard Delta Rate分别为-6.1%、-7.3%和-8.0%,且计算复杂度可承受。
......(全文 1840 字,剩余 1386 字)








