ThinkX与MedicineX团队提出动态街景重建新方法GaussianMove

动态街道场景的精确重建
(映维网Nweon 2025年06月26日)动态街道场景的精确重建对于自增强现实和虚拟现实等应用至关重要。传统的方法依赖于密集的点云和三角形网格,难以应对移动物体、遮挡和实时处理的限制,限制了它们在复杂城市环境中的有效性。尽管多视图立体和神经辐射场带来了先进的3D重建技术,但它们在计算效率和处理场景动态方面面临挑战。
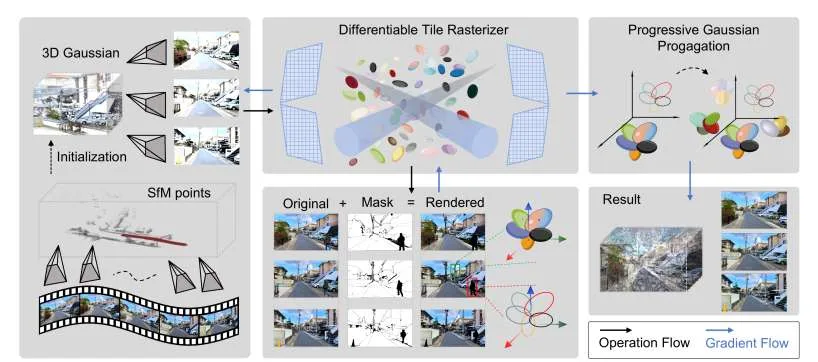
在一项研究中,ThinkX和MedicineX团队提出了一种新的动态街景重建的三维高斯点分布方法。他们引入了一种自适应透明机制,消除了移动物体,同时保留了高保真的静态场景细节。另外,高斯点分布的迭代细化提高了几何精度和纹理表示。研究人员将方向编码与空间位置优化相结合,以优化存储和渲染效率,在保持场景完整性的同时减少冗余。
实验结果表明,所提出方法具有较高的重建质量和较好的渲染性能,并能适应大规模动态环境。相关贡献为实时、高精度3D重建建立了一个强大的框架,推进了动态场景建模的实用性。
......(全文 1874 字,剩余 1502 字)








