韩国研究团队开发ForceGrip系统实现VR手部操作的动态握力控制

这个深度学习代理可以将VR控制器输入转换为真实的握力动态
(映维网Nweon 2025年06月24日)逼真的手部操作是沉浸式虚拟现实的关键组成,但现有的方法通常依赖于运动学方法或动捕数据集,忽略了关键的物理属性,如接触力和手指扭矩。在一项研究中,韩国庆熙大学和高丽大学团队提出了ForceGrip。这个深度学习代理综合了真实的手部操作动作,并忠实地反映了用户的握力意图。
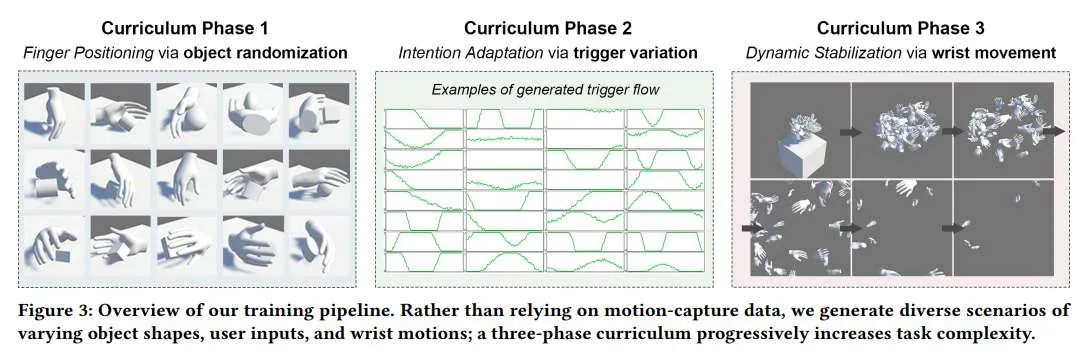
ForceGrip不是模仿预定义的运动数据集,而是使用生成的训练场景来挑战具有广泛物理交互的智能体。为了有效地从复杂的任务中学习,研究人员采用了一个由手指定位、意图适应和动态稳定组成的三阶段学习框架。这种渐进式策略确保了稳定的手物接触,基于用户输入的自适应力控制,以及动态条件下的鲁棒处理。另外,接近奖励功能可以增强自然手指运动和加速训练收敛。
定量和定性评估表明,与最先进的方法相比,ForceGrip具有优越的力量可控性和合理性。
沉浸式手部交互对于引人入胜的虚拟现实体验至关重要,可支持用户自然地掌握和操纵物体。尽管基于控制器的界面(不依赖手部追踪)由于其可访问性、可用性和响应性而变得普遍,但大多数现有解决方案都忽略了对握力的细微控制。相反,他们强调视觉可信的手部动作,并依赖于简单的二进制触发输入。
这种差距破坏了逼真交互的一个关键维度:在物理环境中,用户不断调整他们的握力,以适应物体重量、脆弱性和摩擦的差异,允许物体在不同的力水平下滑动,或者在需要时保持牢固。将所述细微差别转化为VR存在相当大的挑战,因为传统的数据集和动捕技术很少包含详细的物理属性,如接触力或手指扭矩。
因此,提供涉及各种物理需求的不同场景并确保复杂场景能够有效学习至关重要。为了解决这一差距,韩国庆熙大学和高丽大学团队引入了ForceGrip。这个深度学习代理可以将VR控制器输入转换为真实的握力动态。ForceGrip不是模仿静态动捕,而是从随机生成的场景中学习。所提出的学习框架通过三个阶段系统地增加复杂性:手指定位,意图适应和动态稳定。他们进一步结合了基于接近度的奖励来引导自然的指尖接触,从而加速训练和培养自然的手指运动,而不模仿参考运动数据。
......(全文 1703 字,剩余 902 字)











