SIGGRAPH最佳论文:基于Transformer的惯性动捕动态校准系统

首次打破对绝对静态假设的依赖
(映维网Nweon 2025年06月24日)在一项研究中,厦门大学,伯恩茅斯大学,清华大学和卡迪夫大学团队提出了一种用于惯性动捕的动态校准系统,它能在使用过程中动态消除非静态的IMU漂移和传感器与身体间的偏移,实现了用户友好的校准(无需进行T-pose或重置 IMU 朝向 ),并确保了长期鲁棒性。
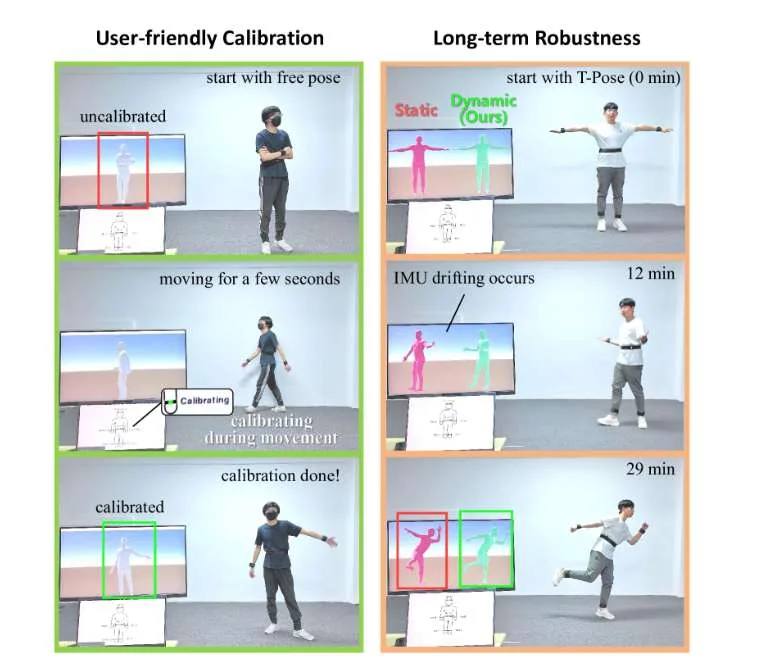
惯性动捕技术凭借高便携性和低成本优势,在VR/AR等场景中应用广泛。然而,传统IMU校准方法依赖校准参数的绝对静态假设,要求用户在使用前完成复杂的传感器坐标系校准与姿态校准,且无法应对磁场干扰、传感器偏移等动态变化,导致长期使用时测量误差显著累积,严重限制了技术的实际应用场景。
对于这个问题,研究人员提出了一种全新的传感器校准范式——动态校准,首次打破对绝对静态假设的依赖。本方法基于更为宽松的短时静态假设,使用基于Transformer的TIC Network从短时间窗口的IMU读数中解算校准参数,并结合基于旋转丰富度的校准触发器对校准参数进行动态更新,以适应真实场景中IMU坐标系动态漂移与穿戴位置变化导致的运动测量误差。
......(全文 878 字,剩余 468 字)








