多校联合团队研发无透镜超薄眼动追踪系统FlatTrack

超扁平和轻量级的眼动追踪系统
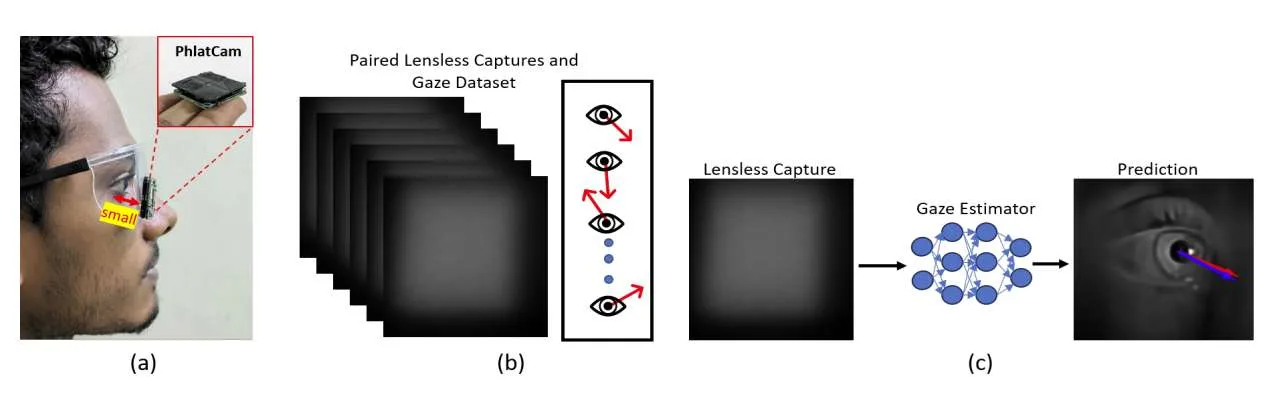
(映维网Nweon 2025年05月28日)对于XR头显,眼动追踪摄像头是一个重要的组件。在一项研究中,印度理工学院马德拉斯分校,美国莱斯大学和北卡罗来纳大学教堂山分校团队提出了一个紧凑的眼动注视追踪器,并使用了基于掩模的无透镜摄像头。
所述摄像头与共同设计的轻量级深度神经网络算法相结合,能够放置在离眼睛非常近的地方,可在眼镜框架内,从而形成超扁平和轻量级的眼动追踪系统。团队收集了大量的近眼无透镜摄像头测量数据,以及校准的注视方向来训练注视点追踪网络。
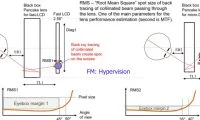
通过真实和仿真实验,团队表明所提出的注视点追踪系统的性能与传统的基透镜追踪器相当,同时保持了更平坦和更紧凑的形状参数。其中,注视回归器具有实时(>125 fps)的注视追踪性能。
......(全文 1648 字,剩余 1346 字)