Mesh2SLAM框架实现无需传感器数据的轻量级SLAM系统

提高了效率并绕过了直接的传感器数据访问
(映维网Nweon 2025年05月22日)SLAM这项基础技术在AR/VR等领域有着广泛的应用。SLAM模拟评估新概念,但在资源受限的设备进行测试面临挑战:计算成本高,传感器数据访问受限。
在一项研究中,德国康斯坦茨大学团队提出了一个使用网格几何投影作为特征的稀疏框架,它提高了效率并绕过了直接的传感器数据访问,从而推进了SLAM研究。
SLAM是计算机视觉领域的一种基础方法,对增强现实和虚拟现实设备的操作至关重要。SLAM算法依赖于各种传感器,如激光雷达、摄像头和深度传感器,在估计设备位置的同时构建环境地图。
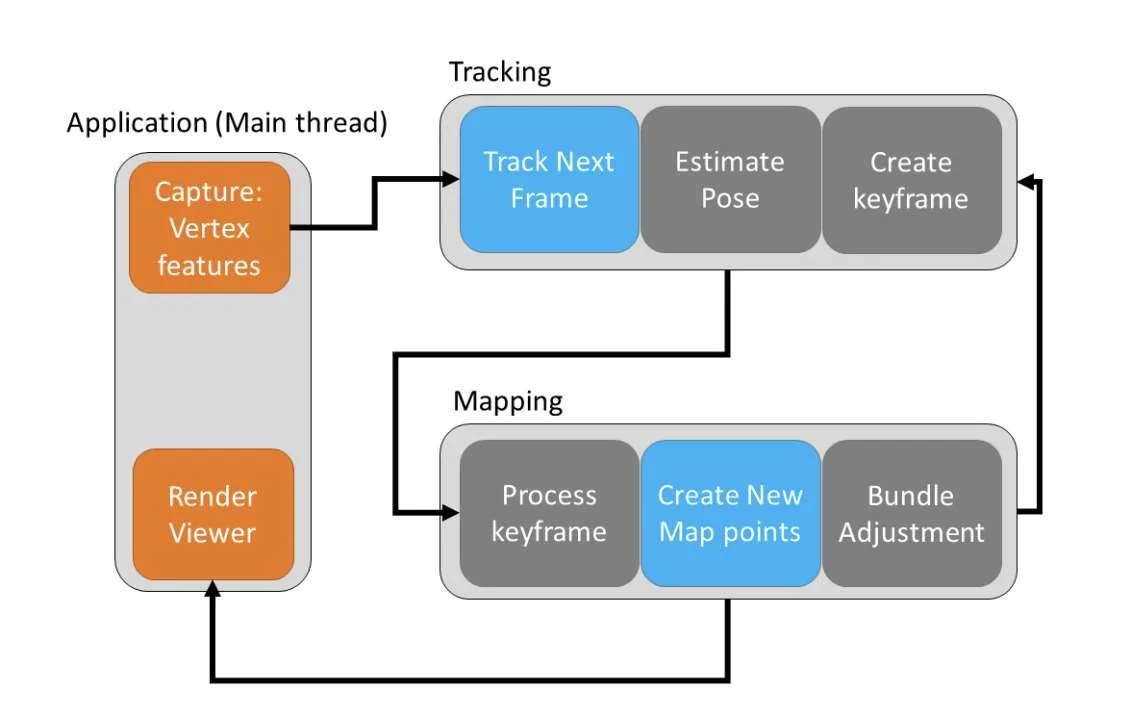
Visual SLAM主要使用图像作为输入数据。然而,需要对图像流进行额外的处理以检测和匹配帧之间的显著特征。特征的准确检测和匹配对于估计连续帧之间的camera姿态至关重要。在实际部署之前,仿真在有效测试SLAM概念方面起着关键作用。它支持快速原型设计,降低噪点,提高可重复性,并可调整建模环境、过程和传感器的参数。
在SLAM仿真中,与现实世界的SLAM一样,从生成的虚拟环境图像中提取图像特征。然而,无论是使用现代人工智能方法还是使用经典的计算机视觉技术,基于特征的方法不仅会带来计算开销,而且在特征匹配中会引入固有的噪点和模糊性。直接使用头显进行SLAM研究的另一个主要挑战是,商业AR/VR硬件的原始传感器数据访问受限。
......(全文 1330 字,剩余 824 字)








