研究员利用触觉反馈提升机器人远程操作效率和任务复杂性

提供触觉反馈机器人远程操作
(映维网Nweon 2025年05月15日)在机器人远程操作中,多模态感官反馈起着至关重要的作用,可为操作者提供更加身临其境的操作体验,减轻认知负担,并提高操作效率。
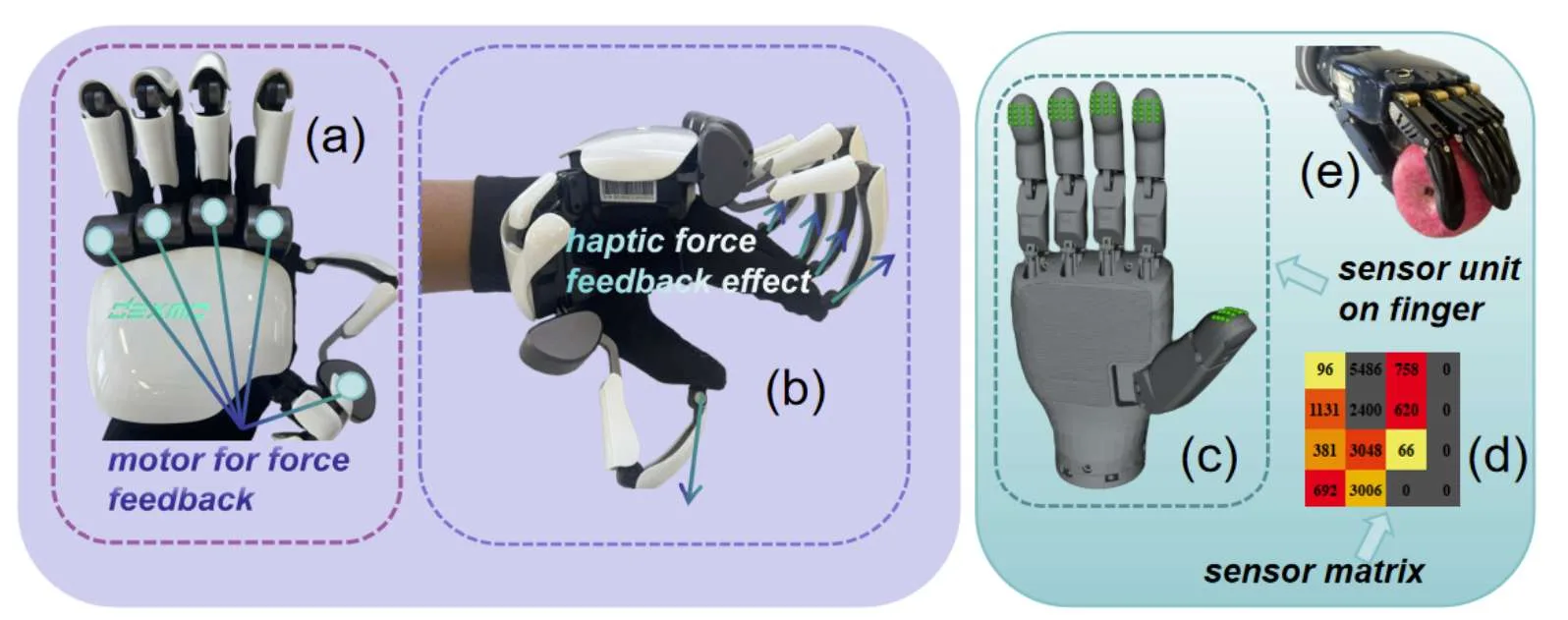
在一项研究中,深圳技术大学,浙江大学和澳大利亚迪肯大学团队开发了一种基于VR头显和力反馈手套的沉浸式双侧同构双手遥控机器人系统,通过触觉反馈来补充视觉体验。
为了评估系统的性能,研究人员进行了一系列的实验,并调查了用户的远程操作体验。结果表明,触觉力反馈增强了肢体感知能力和复杂任务操作能力。另外,它弥补了视觉感知的缺陷,减轻了操作员的工作负担,实现了更加直观和身临其境的遥操作,提高了操作效率,并扩大了机器人遥操任务的复杂性。
机器人可以在一系列的场景中代替人类执行任务,如搜救、水下作业、老年人护理。基于遥控机器人的远程操作可以将人类的智慧和专业知识与机器人相结合。通过远程操作利用人类的专业知识和技能来控制机器人,可以将人类的操作能力转移到远程机器人,从而可以执行更复杂和精确的任务。
要做到这一点,操作员需要足够的感官反馈来感知、理解和推理远程机器人的环境。目前,一种常见的方法是利用VR头显和立体摄像头来为操作员提供来自远端的立体视觉反馈,并以3D立体方式呈现空间信息。
......(全文 2164 字,剩余 1670 字)








