KAIST研发低电压静电触觉手套,4mm厚度实现18.9N/cm²摩擦力

触觉手套
(映维网Nweon 2025年04月17日)随着人们对虚拟现实和增强现实越来越感兴趣,对动觉触觉反馈设备的需求正在迅速增加。基于马达的触觉界面既笨重又笨重,给用户带来了不适。为了解决这个问题,业界正在研究基于静电离合器的触觉手套,以提供快速的响应时间和轻薄外形。
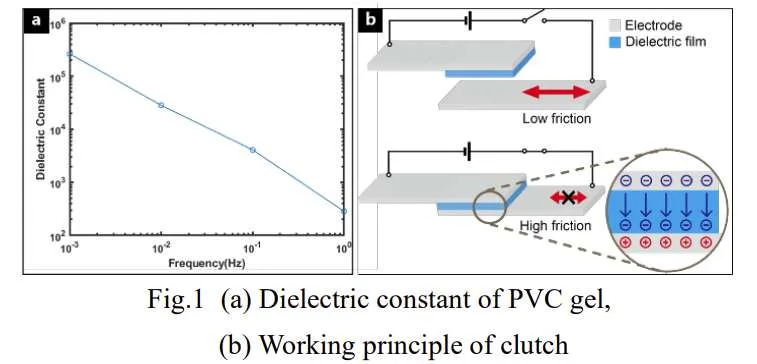
然而,高工作电压和可变力控制依然是需要克服的挑战。韩国科学技术院团队表示,利用具有电荷积累特性的功能聚合物和介电液体的静电离合器在100 V以下的低电压下可以产生0.35 N/cm2至18.9 N/cm2的摩擦剪切应力。基于这一点,相关触觉手套可以产生较高的阻隔力,并且佩戴舒适。
触觉反馈分为触觉感觉和动觉感觉,动觉感觉是提供关于物体形状和刚度的信息。传统的动觉触觉手套使用马达来代表物体的形状和刚性。尽管这种方法提供了简单的控制和快速的响应时间,但它存在缺点,如力密度低,用户不舒服。
......(全文 1795 字,剩余 1461 字)








