东京工大开发指甲触觉反馈装置,提升VR操作精度

推进虚拟现实中的触觉反馈,潜在地实现更为身临其境和逼真的虚拟交互
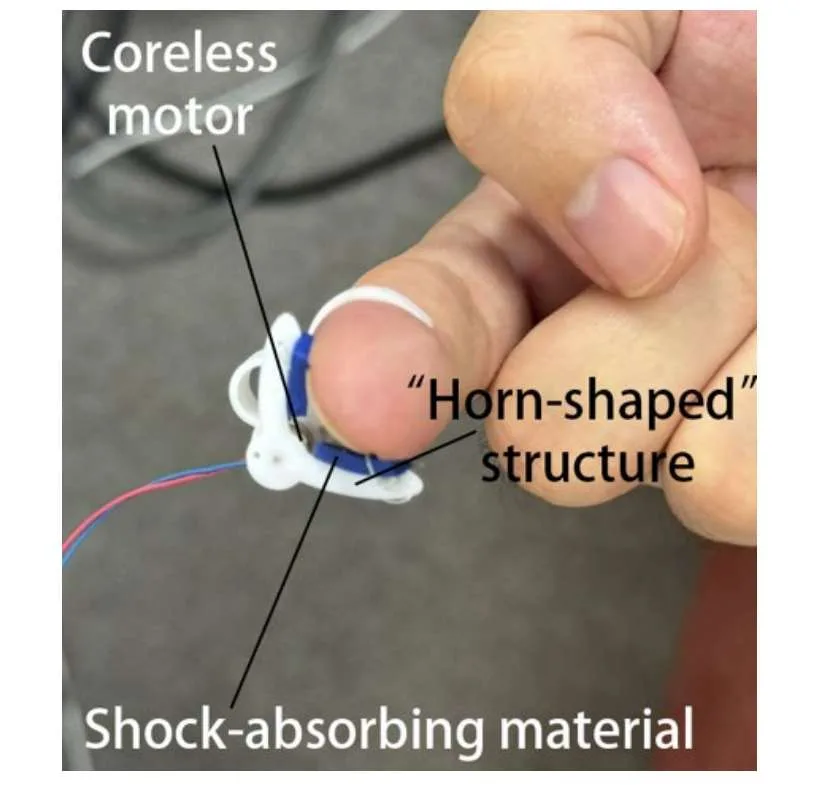
(映维网Nweon 2025年04月17日)在一项研究中,东京工业大学团队介绍了一种增强虚拟现实中灵巧操作的新型触觉装置。通过刺激指甲两侧的机械感受器,所提出的轻量级系统模拟了切向力的感觉。
研究人员采用机械刺激来获得更自然的触觉反馈。初步的“平衡抓握挑战”实验表明,用户使用设备进行了更频繁的微调整,表明精度提高。这项研究旨在推进虚拟现实中的触觉反馈,潜在地实现更为身临其境和逼真的虚拟交互。
实现沉浸式虚拟现实体验依然面临着一个关键的挑战:如何在虚拟环境中实现逼真的灵巧抓取。
灵巧操作是人类与物理世界互动的基本能力,VR缺乏这种能力,极大地限制了用户的沉浸感和操作精度。为了解决这一缺陷,基于手的触觉反馈设备已经成为一个重要的研究课题。然而,现有的触觉设备往往又大又重,严重阻碍了用户在虚拟环境中的活动自由。
所以,迫切需要开发轻量化、小型化的手部交互触觉设备。更重要的是,设备不仅要小巧轻便,而且要向用户的指尖提供触觉反馈,以感知现实世界的感觉,从而在虚拟环境中实现精确的操作和自然的交互。
......(全文 1799 字,剩余 1355 字)








