韩国团队开发EStatiG触觉手套,提升VR抓握体验

触觉手套
(映维网Nweon 2025年03月18日)触觉手套通过提供协调的触觉和视觉信息,可以帮助实现在虚拟现实中与物体交互的沉浸感和真实感。然而,以前的方法主要集中在指尖或远端指骨提供反馈,很少关注其他指骨。
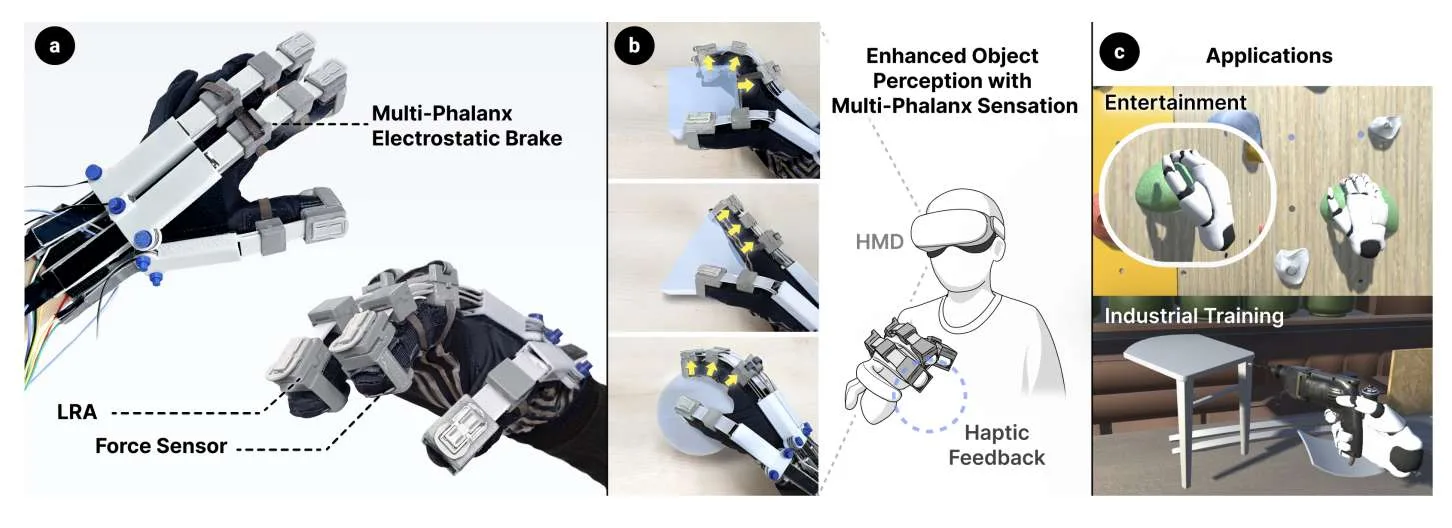
所以在一项研究中,韩国科学技术院和首尔大学团队提出了一种从指尖到近端指骨,在所有手指区域提供力反馈的触觉手套EStatiG。
他们开发了一种双层多层静电离合器(ES离合器),为每个方阵形成一个静电制动器(ES制动器)。研究人员表示,凭借轻量化结构(130克),他们实现了高分辨率的力反馈,同时保持了可穿戴性和可用性。研究结果显示,在与VR中各种物体形状交互时,方阵角度位置的感知以及真实感和沉浸感的整体体验有了显著改善。
抓取允许我们通过无缝地利用对象的属性(如形状、大小和刚度)来执行任务。在虚拟现实中,抓取感知对于提供沉浸式和逼真的体验至关重要,可以增强沉浸感和参与感。
通过这种方式,用户可以像在物理世界中一样对虚拟对象执行相同级别的操作任务。为了实现这一目标,业界已经开发了一系列触觉手套,以便在从远程操作到康复的各种应用中提供逼真的抓取感。
......(全文 1388 字,剩余 959 字)








