多伦多大学团队开发可扩展开源振动触觉工具包VibraForge

虚拟现实健身训练等案例研究展示了VibraForge在不同领域的潜在用途
(映维网Nweon 2025年03月03日)空间化振动触觉反馈系统通过在身体上放置多个振动触觉致动器来传递触觉信息。在复杂的应用中需要越来越多的致动器来充分传达信息,由于现有工具包的可扩展性有限,触觉设计师发现很难创建这样的系统。
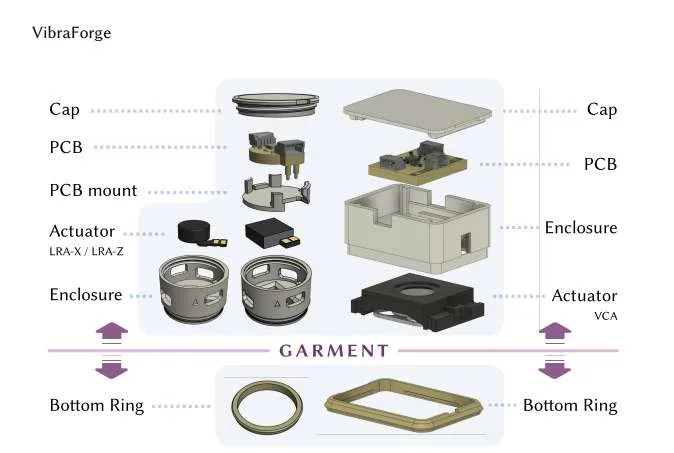
针对这个问题,加拿大多伦多大学团队提出了VibraForge,一个支持多达128个振动触觉致动器的开源振动触觉工具包。每个致动器都封装在一个独立的振动单元内,并由自己的微控制器驱动。利用链式连接方法,每个单元接收来自控制单元的独立振动命令,对强度和频率进行细粒度控制。
团队同时设计了一个GUI编辑器来加速空间振动触觉模式的创作。技术评估表明,振动单元可靠地再现波形,并具有低延迟和高带宽的数据通信。他们补充道,虚拟现实健身训练等案例研究展示了VibraForge在不同领域的潜在用途。
......(全文 1313 字,剩余 971 字)








