美国加州大学团队提出双虚拟空间设计优化XR远程操作延迟

对于所有三个轨迹,端到端延迟分别减少了89%,88%和83%
(映维网Nweon 2025年02月26日)与传统的2D控制相比,扩展现实为远程操作机器人提供了一种更直观的交互方法。近来的研究已经为使用XR进行远程操作奠定了基础,但由于用户运动和代理反馈之间的大延迟,它在需要快速运动和精确操作的任务中失败了。
在一项研究中,美国加州大学团队分析了最先进的XR远程操作系统中的端到端延迟,并提出通过实现双虚拟空间设计和在用户端虚拟空间中定位代理和对象,同时使用来自代理端虚拟空间的周期性ground-truth姿势进行校准来优化延迟。
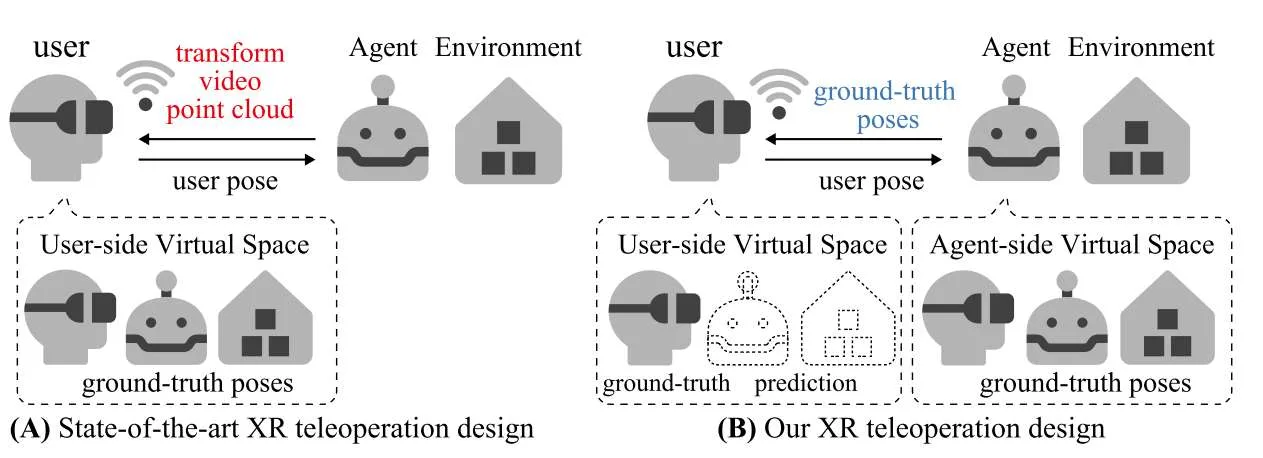
尽管基于XR的现有远程机器人操作系统可以实现基本的可用性,但由于物体的快速移动或精确操作要求,诸如抛球和接球、系鞋带和追踪直线等任务依然无法实现。这是由于用户动作与虚拟空间中代理的视觉反馈之间的高延迟影响。
......(全文 1033 字,剩余 707 字)








