波恩大学研发坐式足部控制器提升VR运动控制体验

坐式足部控制器
(映维网Nweon 2025年01月23日)在一项研究中,德国波恩大学团队提出了一种新型的坐式足部控制器,以用于控制用户在虚拟现实环境中的运动。
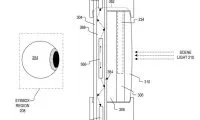
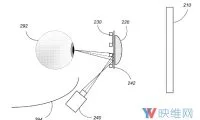
其中,你可以在两个轴上倾斜双脚,产生向前、向后和侧向运动。另外,一个独立的旋转接头允许绕垂直轴旋转。连接在所有关节的弹簧可以令控制器自动居中。定位追踪器则用于将方向转换为运动命令。
对于虚拟现实环境,目前存在各种各样的控制选择,比如人脑接口、万向移动平台、舌头控制器、眼动追踪和裸手追踪等,而它们都有各自的优缺点。
坐式控制器允许用户以舒适的坐姿进行控制,并允许长期使用。另外,它们可以支持残疾人。在研究中,德国波恩大学团队提出了一种全新的三自由度脚控制器。
所提出的控制器在设计方面强调了用户友好性,即便没有事先经验,你都只需最小的培训开销。控制器具有较高的控制精度,能够实现精确和细粒度的机动。另外,当用户将脚从控制器上移开时,通过为平动轴和旋转轴安装自定心弹簧机构,控制器可提供自动状态重新初始化功能。
......(全文 916 字,剩余 520 字)