中科院、北理工、百度等团队提出神经隐式SLAM混合优化方案HERO-SLAM

增强了鲁棒性
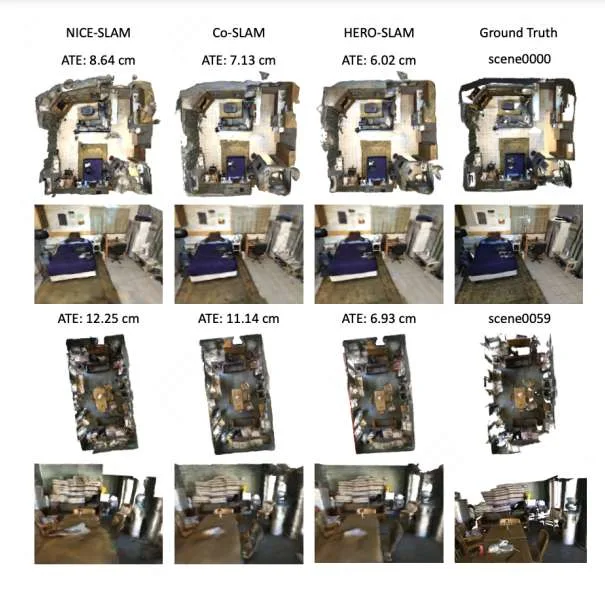
(映维网Nweon 2025年01月15日)神经隐式SLAM研究近年来取得了令人鼓舞和令人印象深刻的成果。然而,神经SLAM的鲁棒性依然是一个未解决的问题,特别是在具有挑战性或数据有限的情况下。在一项研究中,中国科学院,北京理工大学,百度团队提出了HERO-SLAM。
它结合了神经隐式场优化和特征度量优化的优点,优化了多分辨率隐式场,增强了在视点突然变化或数据收集稀疏的环境下的鲁棒性。基准数据集的综合实验结果验证了所述混合方法的有效性,相对于其他方法具有更好的性能。
SLAM是机计算机视觉领域的一项基本任务,并推动着AR/VR等一系列的前沿领域。视觉SLAM的本质在于它能够重建三维环境的结构和视觉细节,同时实时追踪camera的位置。它在实际应用中成功的关键是依赖于运行时效率、可扩展性,以及最重要的鲁棒性。
......(全文 1092 字,剩余 778 字)








