研究分享:室内手持式AR的阻碍因素以及解决方案

查看引用/信息源请点击:techxplore
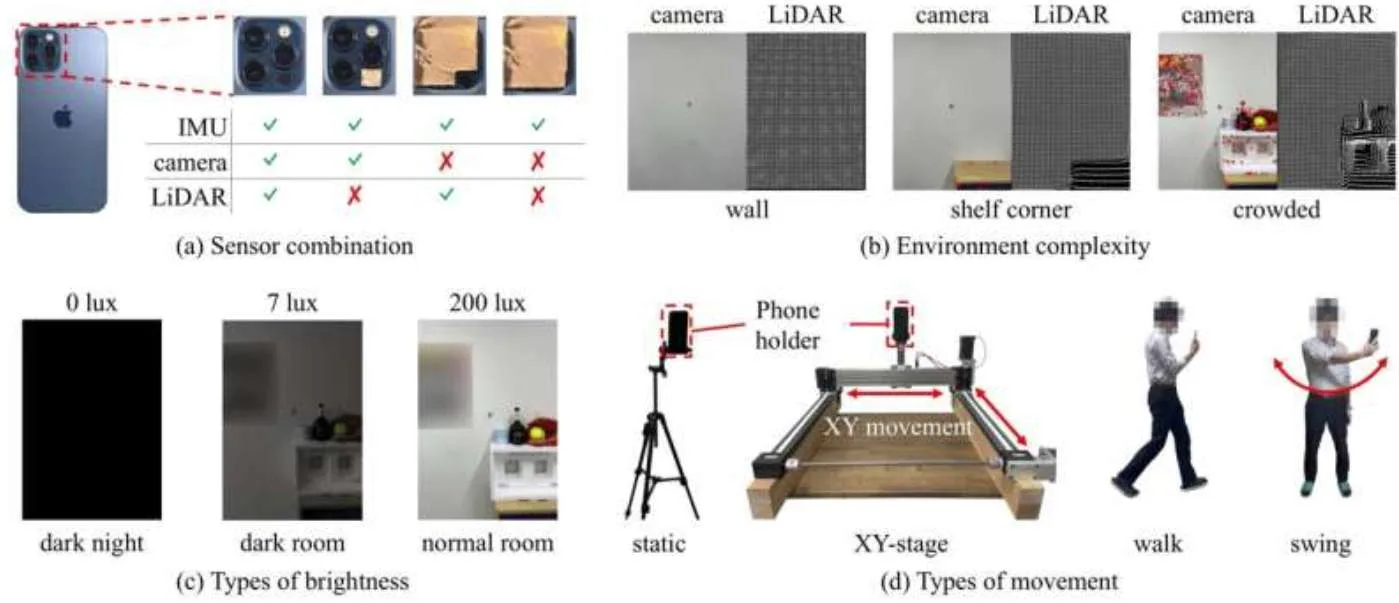
研究人员进行了113小时的实验和案例研究,超过316种模式
(映维网Nweon 2024年12月10日)基于智能手机的增强现实可以将视觉元素叠加在智能手机摄像头图像,并支持一系列的用例,包括导航和游戏等等。
但如果你想在建筑物内使用增强现实应用程序,若现有的增强现实技术无法获得清晰的GPS信号时,它们就会陷入困境。
但经过对智能手机和用户的一系列广泛而仔细的实验,日本大阪大学的研究人员已经详细确定了问题的原因,并确定了一个潜在的解决方案。
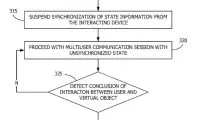
研究人员指出:“对于增强现实,智能手机需要知道两点:在哪里,亦即定位,以及如何移动,亦即追踪。”
为了做到这一点,智能手机使用了两个主要系统:视觉传感器(摄像头和激光雷达)和惯性测量单元(IMU)。
......(全文 640 字,剩余 364 字)