加州大学团队提出AR/VR可穿戴触觉人造肌肉皮肤HAMS

可以集成到XR系统中的可穿戴触觉人造肌肉皮肤HAMS
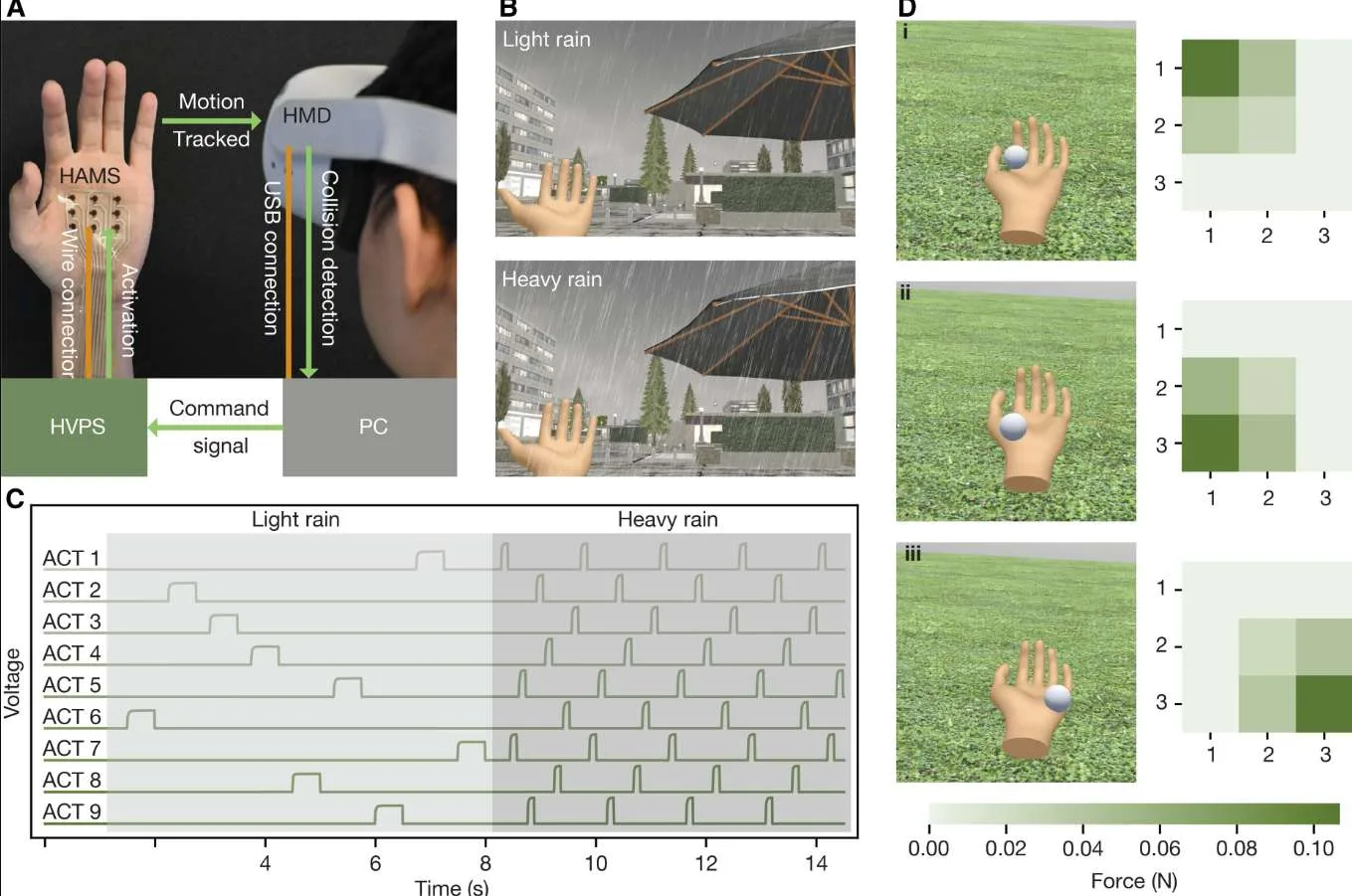
(映维网Nweon 2024年10月28日)现有的触觉致动器通常为刚性,并且在复制真实世界触觉的能力方面受到限制。针对这个问题,美国加州大学团队提出了一种可以集成到XR系统中的可穿戴触觉人造肌肉皮肤HAMS,从而增强沉浸感,并在娱乐、教育和辅助技术中提供潜在的应用。
据介绍,它基于全软毫米级多层介电弹性体致动器(DEA),能够产生明显的面外变形。DEA采用厚度变化的多层结构,可实现较大的面外位移和力,同时保持舒适性和耐磨性。实验结果表明,所述方法可以产生复杂的触觉反馈,并具有较高的感知精度。
当前的XR技术主要通过交互式视觉和声音增强人类体验,而XR的下一个前沿领域旨在通过结合触觉来重新定义沉浸感。这有可能彻底改变各个领域,包括娱乐,通信,教育。
......(全文 1360 字,剩余 1048 字)








