清华大学、商汤科技构建用于6DoF VR体验的密集空间定向光场数据集Den-SOFT

清华大学和商汤科技
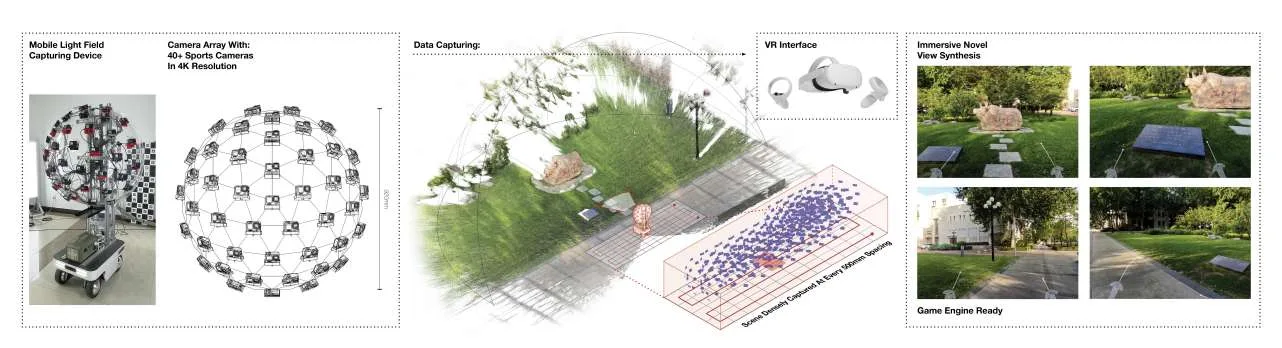
(映维网Nweon 2024年08月20日)为了帮助AR/VR的发展,清华大学和商汤科技构建了一个用于六自由度沉浸式体验的密集空间定向光场数据集Den-SOFT。
随着深度神经网络的广泛应用和虚拟现实技术的飞速发展,现实世界的数字化重建受到了前所未有的关注。以NeRF为代表的隐式神经辐射场渲染方法将这一领域的研究推向了高潮。然而,尽管3D重建在理论方面取得了进步,但由于算法的高度复杂性和高质量数据集的稀缺,所述领域依然面临着重大挑战。
在与VR技术密切相关的大空间光场重建领域尤其如此,迫切需要覆盖足够大范围的场景,具有足够质量和丰富程度的数据集以支持真正沉浸式六自由度VR体验的算法研究和测试。
近年来,尽管业界在构建高质量的3D场景数据集方面投入了大量的精力,但VR设备性能的显著提高暴露了现有数据集在多个方面的不足。相关限制在一定程度上影响了数据集满足日益增长的VR体验需求的能力。
具体而言:现有数据集无法满足大规模静态场景的高精度、高保真重建需求。大多数公开数据集的分辨率在2K以下,捕获密度低,不利于高精度场景细节重建。另外,大多数数据集本质上是以对象为中心,对背景细节的覆盖非常小。
......(全文 1355 字,剩余 898 字)











