研究员提出基于Focalpose改进单RGB图像关节6D姿态和camera焦距估计准确性

韩国庆北国立大学
(映维网Nweon 2024年08月19日)增强现实已迅速成为计算机视觉领域的一项关键技术。能够数字世界与物理世界无缝融合的增强现实能够提高用户参与度和操作效率的有效性。然而,这在很大程度上依赖于6D姿态估计的精度。
随着增强现实从媒体和娱乐扩展到工业和医疗应用,6D姿势估计的进步变得越来越重要。然而,使用不受控制的“in the wild”图像的AR应用程序的兴起带来了新的挑战。这种图像通常缺乏关键的元数据(如焦距),从而对传统的姿态估计方法提出了重大挑战。
所以,韩国庆北国立大学从Focalpose的神经渲染和比较策略汲取灵感,提出了一种能够有效分解从焦距估计z轴平移的方法。团队指出,这种改进不仅简化了估计过程,而且能够在各种实际应用中确保鲁棒性和准确性。
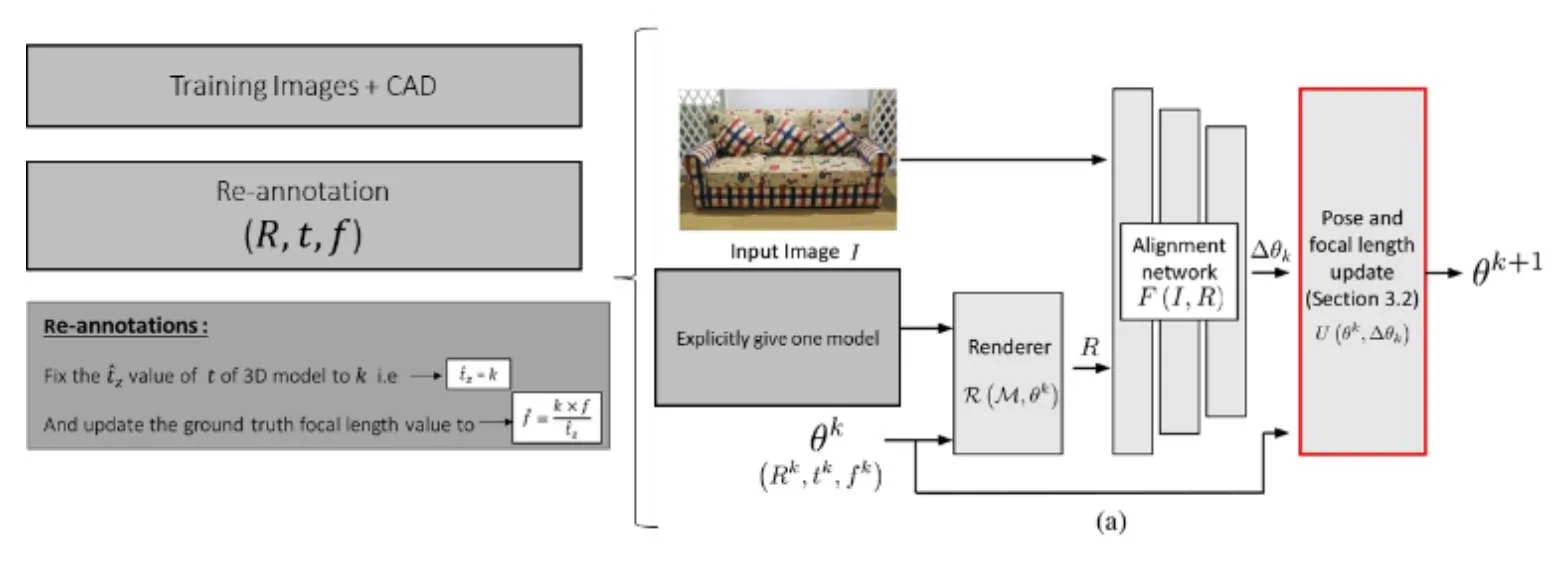
在研究中,团队提出了一种基于Focalpose的方法,而它可以改进单个RGB图像的关节6D姿态和camera焦距估计的准确性。相关改进主要集中在优化神经渲染和比较策略,通过分解焦距和z轴平移的同时估计。
姿态估计的“渲染和比较”涉及到在各种姿势中生成对象的合成图像,然后将渲染与现实世界的图像进行比较。这种技术利用深度学习算法来改进姿态预测,通过最小化渲染合成图像与真实图像之间的差异来确保准确性。
......(全文 1092 字,剩余 624 字)








