香港大学、加州大学研究用Vision Pro操作远程机器人系统

查看引用/信息源请点击:techxplore
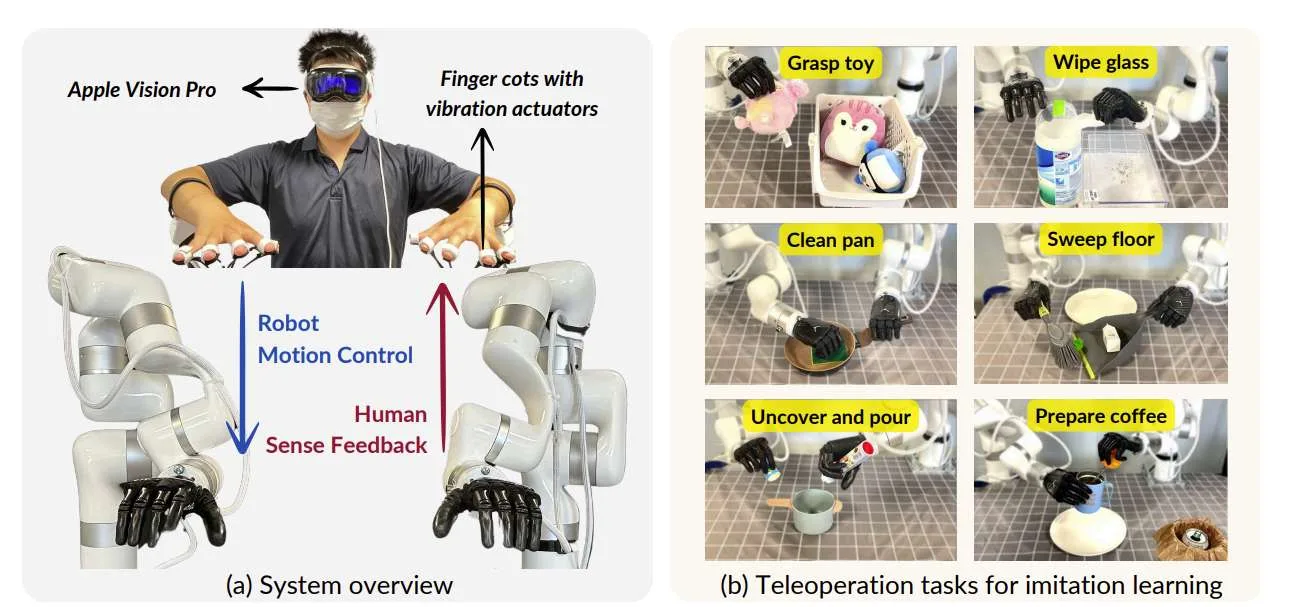
利用Apple Vision Pro来帮助操作员远程操作机器人系统
(映维网Nweon 2024年07月18日)模仿学习可以帮助训练机器人可靠地完成日常任务,比如洗碗或做饭。尽管有潜力,但模仿学习框架依赖于详细的人类演示。
收集相关数据的一种方法是使用远程操作系统,它允许人类映射控制机器人来完成特定任务。然而,大多数现有的远程操作系统都难以有效地处理再现人类执行的复杂和协调的动作。
香港大学和加州大学的研究人员开发了一种名为Bunny-VisionPro的系统,利用Apple Vision Pro来帮助操作员远程操作机器人系统,并完成双手灵巧的操作任务。
值得一提的是,加州大学圣地亚哥分校与麻省理工学院同样开展了类似的研究。
......(全文 974 字,剩余 695 字)











