MIT + Meta研究员提出利用阴影模拟3D场景,包括视线外对象

利用阴影来模拟3D场景的方法
(映维网Nweon 2024年07月08日)计算机视觉对于AR/VR,3D重建,工业检测,无人机和自动驾驶汽车等领域而言具有重要应用。在一项研究中,麻省理工学院和Meta的研究人员提出了一种利用阴影来模拟3D场景的方法,包括遮挡在视线之外的对象。团队表示:“这项技术可能会带来更安全的自动驾驶汽车、更高效的AR/VR头显或更快的仓库机器人。”
想象一下,你驾驶着一辆自动驾驶汽车穿过隧道,但你不知道的是,前方发生了车祸,导致交通中断。通常情况下,你需要通过前面的车辆来判断是否应该开始刹车。但如果你的汽车可以看到更前面的状况,并更快地刹车呢?
麻省理工学院和Meta的研究人员开发了一种有朝一日可以做到这一点的计算机视觉技术。
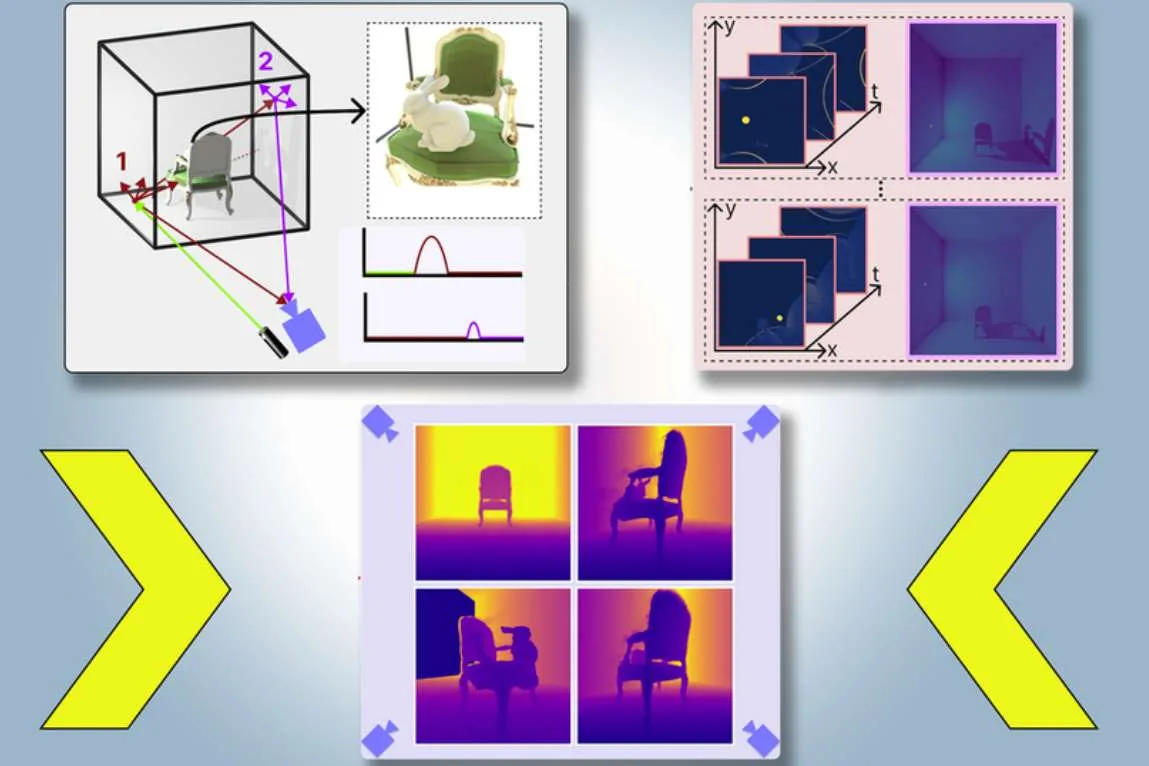
其中,可以使用单个摄像头位置的图像来创建整个场景的物理精确3D模型,包括遮挡区域。他们的技术是利用阴影来确定场景中遮挡区域。
团队将这种方法称为PlatoNeRF。作为说明,这个名字基于柏拉图的洞穴寓言:一群囚犯生活在洞穴中,手脚困住,无法转身,只能背对着洞口。他们前面是一堵墙,身后则燃烧着一堆火,他们在墙上看到影子,并认为影子是真实的。囚犯只能通过投在洞穴墙壁的影子来辨别外面世界的现实。
......(全文 1857 字,剩余 1407 字)








