康奈尔大学、爱登堡大学提出用声呐眼动追踪取代光学眼动追踪

用基于声呐的眼动追踪取代传统的光学摄像头追踪
(映维网Nweon 2024年03月11日)一般来说,声音的属性会根据声音所在的环境而变化。例如,房间的大小布局和材料成分会影响声音反射,吸收和回荡的方式。环境的声学特性可以影响所述环境中的声音属性。根据这一现象,人类构思了一系列的实用性工具,比如说声呐(声呐是英文缩写“SONAR”的音译,其中文全称为声音导航与测距/Sound Navigation And Ranging)。
实际上,业界早已在探索将声呐应用于AR/VR领域。例如微软和康奈尔大学早前都有进行过相关的研究。
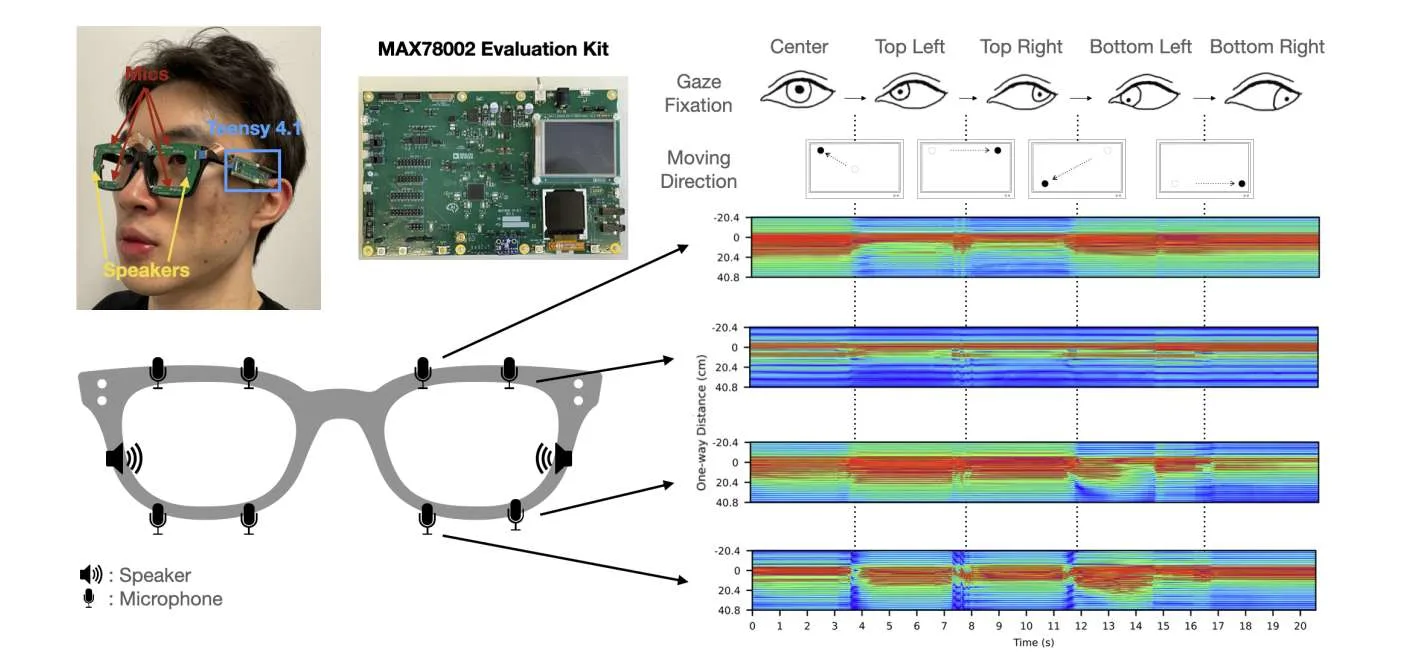
现在康奈尔大学携手爱登堡大学,再次发布了与声呐+AR/VR的相关实验:基于声呐的眼动追踪,从而取代光学摄像头追踪。
......(全文 1300 字,剩余 990 字)