微软AR/VR专利分享修复具有光吸收表面的对象的图像深度值

修复具有光吸收表面的对象的图像深度值
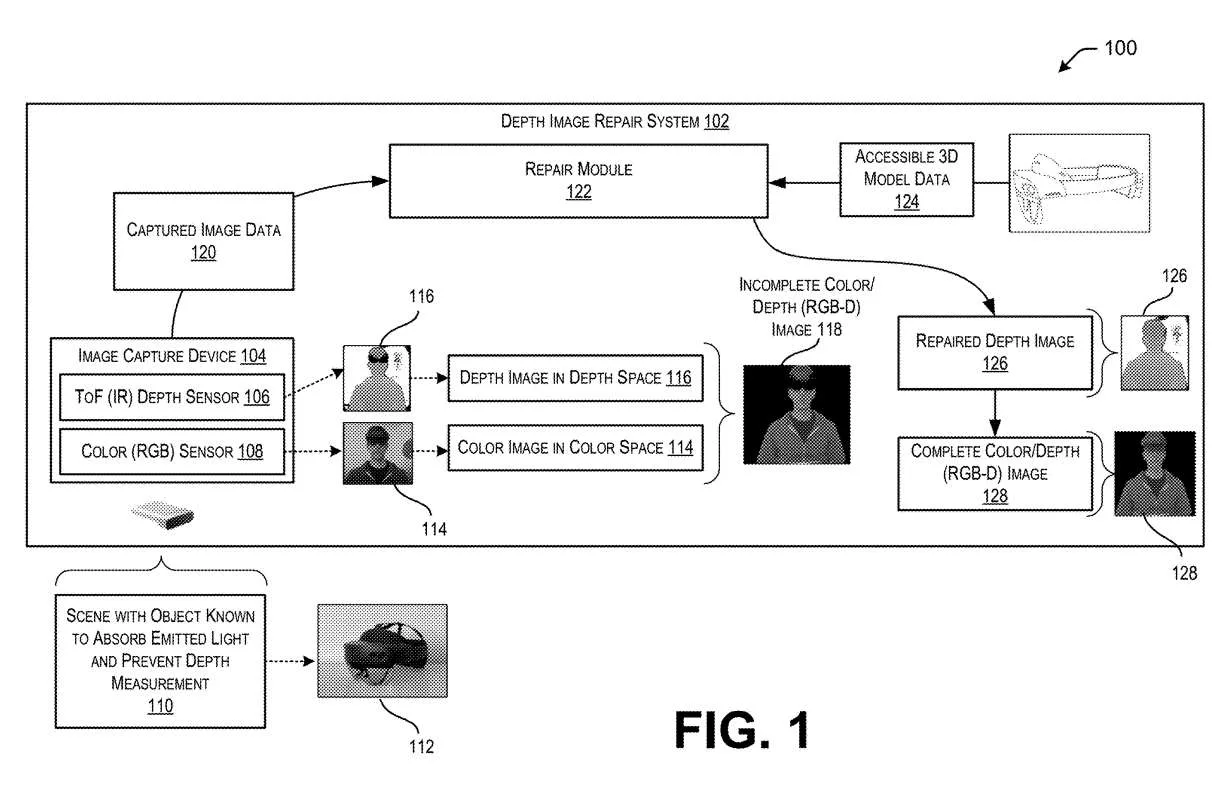
(映维网Nweon 2023年11月02日)XR系统可以使用深度图像来显示或重建三维环境。图像捕获设备可以使用红外IR技术或其他基于光的技术来确定场景中的深度并创建深度图。例如,摄像头可以使用飞行时间深度传感器。通过测量发射光和反射光之间的相移,可以根据相移确定深度图像中各种像素的深度信息。
遗憾的是,飞行时间深度传感器在准确确定场景深度信息方面可能会遇到问题。例如,场景中的对象可能包括由吸收发射光的材料制成的表面,所以飞行时间深度传感器无法清楚地检测或看到反射的光。这种检测和/或可见性的缺乏会导致深度图像中缺失或损坏的深度值。
在名为“Repairing image depth values for an object with a light absorbing surface”的专利申请中,微软提出的方法可用于修复具有光吸收表面的对象的图像深度值。
......(全文 3083 字,剩余 2766 字)