微软AR/VR专利为图像拖影提出补偿摄像头全局运动和对象局部运动解决方案

补偿摄像头的全局运动和补偿对象的局部运动
(映维网Nweon 2023年10月09日)为了提高显示给用户的图像质量,MR系统可以选择执行所谓的“时间过滤”。时间滤波指的是系统将多个时间点捕获的数据组合在一起以生成特定输出的过程。换句话说,系统本质上是将多个图像堆叠在一起,并以特定方式组合它们,以产生具有改进质量的聚合图像。
但在执行时间过滤时会遇到各种挑战。例如当系统捕捉多个连续图像时,场景或环境中的对象正在移动会产生所谓的拖影。
在名为“Advanced temporal low light filtering with global and local motion compensation”的专利申请中,微软就提出了一种相关的解决方案。
在一个实施例中,专利描述了用于生成时间滤波图像的技术,而所述图像设计为补偿摄像头的全局运动和补偿对象的局部运动。
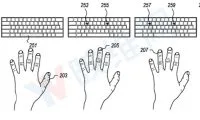
所述方法包括,获取历史帧和当前帧;对历史帧执行全局运动补偿操作,以重新投影历史帧的姿态以匹配当前帧的姿态;将历史帧与当前帧进行比较,以识别表示移动对象的像素;对于像素中的每一个,计算光流矢量。
然后将光流矢量应用于像素以将像素移位到新的位置。在历史帧中的新位置对应于在当前帧中识别的位置;接下来,用历史帧对当前帧进行时间滤波。
......(全文 2864 字,剩余 2425 字)