苹果专利分享iPhone 3D拍照技术细节:创建查看物理环境3D表示不完整的3D照片

3D图片
(映维网Nweon 2023年09月26日)根据早前社区的情报,未来的iPhone Ultra似乎能够拍摄空间图片和视频,并允许用户通过苹果Vision Pro进行浏览查看。
照片通常是从单一视点捕获的物理环境的2D表示。这类照片通常是在2D电子设备查看,没有深度。3D图片则是具有深度。但对于iPhone Ultra这样的设备,直接拍摄的3D照片可能只有正面数据而没有背面数据。换句话说,对于电子设备获得的3D照片,而它是不完整的3D表示。
所以应该如何应对呢?在名为“3d photos”的专利申请中,苹果提出了一种创建和查看物理环境不完整3D表示的3D照片的方法。
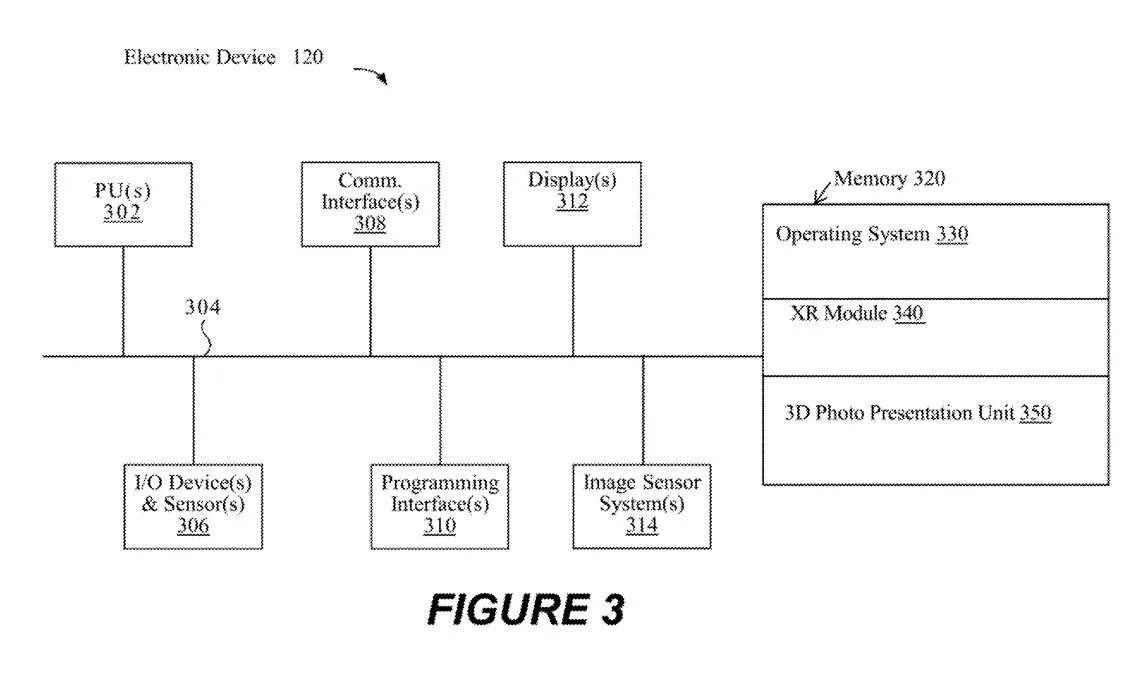
在图3中,XR模块340配置为创建、编辑、呈现或体验XR环境。3D照片呈现单元350配置为在XR环境中呈现3D照片。3D照片呈现单元350配置为基于相对于3D照片在XR环境中的放置位置的查看位置来确定3D照片的呈现模式。
......(全文 3867 字,剩余 3548 字)