微软AR/VR专利提出利用角、线特征进行多摄像头图像对齐

利用角和线特征来进行图像对齐的方法
(映维网Nweon 2023年09月25日)MR系统可以采用多个摄像头,但在呈现图像图像需要对齐图像。然而,图像对齐存在挑战。所以在名为“Image alignment using corner and line features”的专利申请中,微软就提出了一种利用角和线特征来进行图像对齐的方法。
当然,行业早已存在利用角特征来进行图像对齐的方法。然而,在图像中识别角并根据识别的角对齐图像是一个耗时且计算密集型的操作。
微软提出的是一种更有效的改进技术,可以实现更好的特征匹配。发明主要介绍了使用角特征和线特征来执行视觉对齐的混合方法,而这种解决方案导致对齐过程中所需的约束更少,从而改进计算效率和特征匹配。
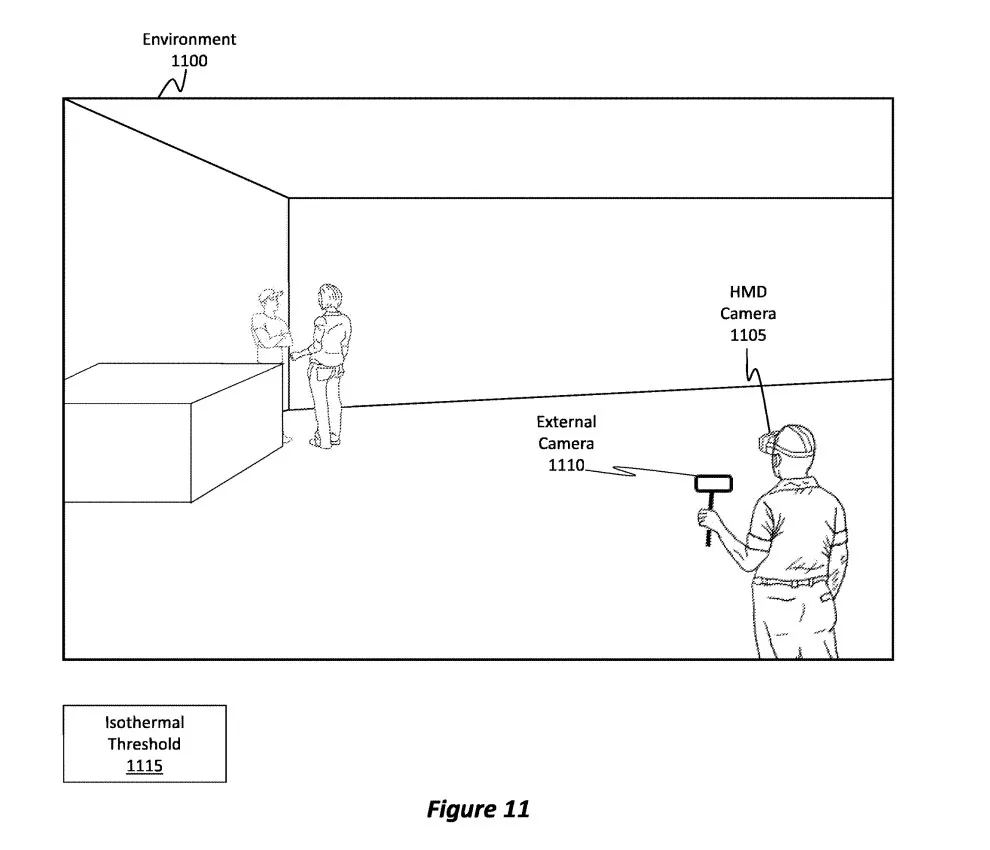
图11示出一个示例环境1100,其中用户正在使用头显摄像头1105和外部摄像头1110。如前所述,需要对齐从这两个摄像头生成的图像内容。但环境1100可能是一个弱光环境,或者可能是一个在热梯度或对比度方面具有低对比度的环境。
例如,在深夜物体冷却后,环境的温度梯度可能通常是均匀的。在这种情况下,环境的温度曲线或梯度可能低于特定的等温阈值1115。在这种情况下,用于对齐内容的传统技术可能会失效。微软描述的实施例为这类场景提供了解决方案。
......(全文 2639 字,剩余 2194 字)