微软专利通过改进时间滤波方法为HoloLens生成超级分辨率图像

超级分辨率图像
(映维网Nweon 2023年08月04日)为了提高显示给用户的图像质量,特定的MR系统会执行所谓的“时间滤波”,亦即将在多个时间点捕获的数据组合起来以生成特定输出。换句话说,系统本质上是将多个图像堆叠在一起,并以某种方式组合它们,从而产生具有改进质量的聚合图像。
但在执行时间滤波时会遇到各种挑战。例如当系统捕捉多个连续图像时,场景或环境中的对象正在移动,就会产生所谓的拖影重影。另一个挑战是,当摄像头本身在生成图像时发生运动。摄像头的运动同样会造成时间滤波过程产生偏差。
在名为“Generate super-resolution images from sparse color information”和“Use motion data to generate higher resolution images”的专利申请中,微软就介绍了通过改进的时间滤波方法来产生超级分辨率图像。
◐ 时间滤波
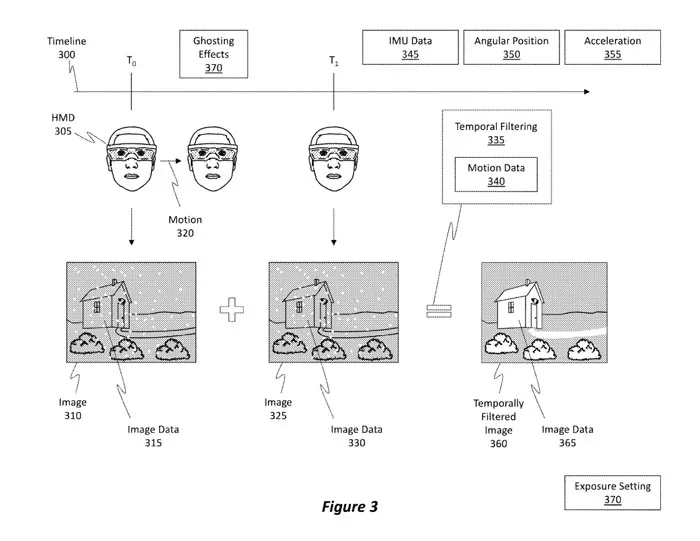
如上所述,为了提供更高质量的图像,MR头显可以配置为执行时间滤波。图3显示了一个时间轴300。在时间T0,头显30生成包含图像数据315的图像310。图像310是在弱光环境下生成。在时间T0之后,头显经历了一定数量的运动320。
在时间T1,头显305然后产生第二图像325,其中包括图像数据330。根据微软介绍的方法,系统能够使用图像310和图像325来执行时间滤波335操作。所述实施例同时可以使用由IMU生成的运动数据340来补偿在时间T0和T1之间发生的运动320。
......(全文 5136 字,剩余 4688 字)