Meta为AR/VR变焦光学提出减轻轴承蠕变的方法

减轻轴承蠕变
(映维网Nweon 2023年05月05日)困扰现代VR/AR头显的一个重大挑战是视觉辐辏调节冲突。在现实世界中,人眼可以自然地对焦一个对象,而世界的其他元素则脱离焦点。VR/AR的问题是,无论你在数字世界中看向何方,你都只是盯着固定的屏幕,亦即看着相同的距离。换句话说,视觉调节(弯曲眼睛晶状体以聚焦不同距离的对象)永远不会改变,但视觉辐辏(眼睛向内旋转以将每只眼睛的视图重叠成一个对齐图像)却会出现,从而导致视觉辐辏调节冲突。
视觉辐辏调节冲突容易造成用户产生眼睛疲劳,恶心,头晕等问题。针对这种情况,行业厂商纷纷尝试的一个主要解决方案是能够相应地改变焦距或提供不同焦平面的变焦式头显。
变焦距系统中的变焦距光学元件通常采用倾向于表现出“轴承蠕变”的轴承系统。轴承蠕变通常发生在轴承相对于固定和移动座圈偏离中心位置时。轴承蠕变存在诸多原因,包括但不限于周围结构的刚度不足、精度不足、垂直操作、高加速度和速度、热膨胀差异等。
轴承蠕变的典型解决方案使用齿条和小齿轮式齿轮系统。在齿条和小齿轮式齿轮系统中,小齿轮或带钉滚柱通过连接到导轨的齿条保持轴承保持架相对于固定和移动座圈的对准。但对于头戴式显示器的变焦系统而言,这增加了相当大的制造复杂性、成本和重量。
所以在名为“Creep mitigation in ball-bearing systems”的专利申请中,Meta提出了一种减轻轴承蠕变的方法。
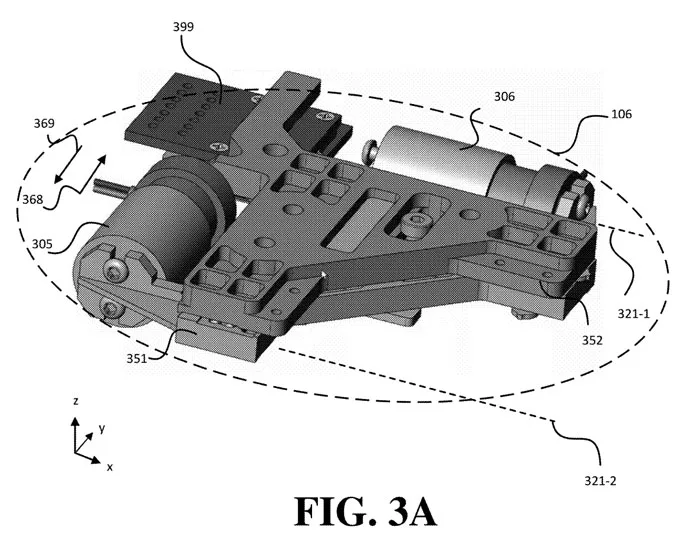
图3A-3C示出了包括防蠕变系统309的变焦距致动模块。在一个实施例中,可以利用防蠕变系统309的防蠕变机制341来减轻与轴承361相关联的轴承蠕变量。
为了将光学模块104定位到头显101的用户的适当浏览位置,致动器305配置为在第一可移动滑架边界321–1和第二可移动滑架边界321–2内沿第一方向368和第二方向369移动可移动滑架352。
可移动滑架352在第一方向368和第二方向369的移动激活防止轴承蠕变的防蠕变机制341。
变焦距致动模块包括固定滑架351、可移动滑架352、致动器305和防蠕变系统309(如图3C所示)。可移动滑架352和致动器305共同配置为在可移动滑架352沿第一方向368和第二方向369移动期间控制防蠕变系统309中的防蠕变机制341的移动。
每个防蠕变机制341(例如防蠕变机制341-1、防蠕变机制340-2和防蠕变机制343-3)具有相关的轴承槽331,其配置为围绕轴承361(例如,图3C中所示的轴承361-1、轴承361-2和轴承361-3),以在可移动滑架352移动时限制轴承361的运动在第一方向368和第二方向369上。
在一个实施例中,在可移动滑架352沿第一方向368或第二方向369移动期间,轴承361在轴承槽331内的定位与防蠕变机制341的角度定位相结合,以防止轴承滚珠361具有相关联的轴承蠕变。
所以,防蠕变机制341可以减轻与用于移动变焦距致动模块106中的可移动滑架352的轴承361相关联的轴承蠕变量。
除了变焦距致动模块106之外,焦点预测模模块108的编码器399在图3A-图3中示出。
焦点预测模模块108的编码器399配置为追踪光学模块的位置或状态,以预测光学模块104未来的一个或多个状态或位置。焦点预测模模块累积与光学模块的先前状态、未来状态和当前状态相对应的位置信息。
在一个实施例中,焦点预测模模块使用累积的信息来指示可移动滑架352使用变焦距致动模块的致动器1,以从第一可移动滑架位置316移动到第二可移动滑架位置317。
固定滑架351配置为用作变焦距致动模块106的防蠕变系统309(在图3C中描绘为防蠕变机制341–1、防蠕变机制341-2和防蠕变机制342-3的组合)的固定基座。
在一个实施例中,固定滑架351固定,因为固定滑架352不相对于防蠕变系统309的运动移动。固定滑架351使用第一固定装置322-1在第一固定位置325处固定到致动器305。在一个实施例中,固定滑架351可选地使用第二固定装置324-1在第二固定位置326处固定到致动器306。在
固定滑架351定位在变焦距致动模块106中,以允许致动器305、致动器306和编码器399保持固定到固定滑架352,同时致动器305相对于轴线366在第一方向368或第二方向369上移动可移动滑架352。在一个实施例中,轴366被定位在x,y,z坐标系的y方向上。
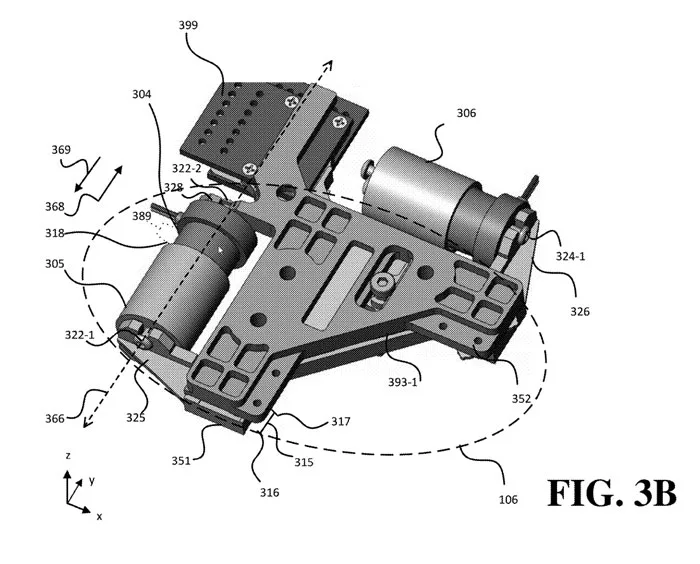
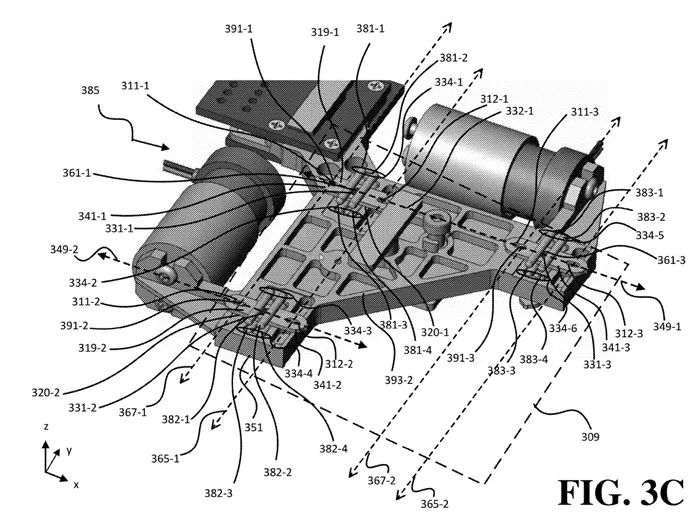
参考图3C和图3B,固定滑架351包括固定滑架锚销391,固定滑架锚销391配置为用作防蠕变机制341的锚定器。固定滑架锚销391允许使用固定滑架槽311栓接到固定滑架锚销391的防蠕变机制341,以沿锚固轴线367-1在第一方向368和第二方向369上成角度地移动,并沿锚固轴线368-2在第一方向366和第三方向369上有角度地移动。
固定滑架锚销391沿着锚固轴线367-1和锚固轴线367-2固定到固定滑架351。例如,固定滑架锚销391-1和固定滑架锚销391-2沿着锚定轴线367-1定位,固定滑架锚销391-3沿着锚定轴367-2定位。
固定滑架槽311是防蠕变机制341中的槽,并用于使用固定滑架锚销391将防蠕变机制342栓接到固定滑架351。固定滑架锚销391配置为将防蠕变机制341的固定滑架槽311栓接到固定滑架351,以允许防蠕变机制341从固定滑架锚销391沿着锚固轴线367-1和锚固轴线367-2成角度地移动。
在一个实施例中,可移动滑架352平行于变焦距致动模块106中的固定滑架351定位,使得致动器305能够控制可移动滑架352在第一方向368和第二方向369上的移动。
在一个实施例中,可移动滑架352平行于变焦距致动模块106中的固定滑架351定位,使得可移动滑架352的移动控制销392在移动控制轴365处栓接到移动控制槽312,并且固定滑架锚销391在锚定轴367处栓接到固定滑架槽311。
例如,可移动滑架352平行于变焦距致动模块106中的固定滑架351定位,使得可移动滑架352的移动控制销392-1在移动控制轴365–1处栓接到移动控制槽312–1,可移动滑架352的移动控制销392–2在移动控制轴365–1处栓接到移动控制槽312–2,并且可移动滑架352392–3在移动控制轴线365–2处栓接到运动控制槽312-3。
类似地,可移动滑架352平行于变焦距致动模块106中的固定滑架351定位,使得固定滑架的固定滑座锚销391-1在锚轴线367-1处栓接到固定滑架槽311–1,固定滑架351的固定滑架锚销391-2在锚定轴线367-1处栓接到固定滑架槽311-2,并且固定滑架351的固定滑架锚固销391-3在锚定轴367-2处栓接到滑架槽311-3。
参考图3C,防蠕变系统309包括防蠕变机制341–1、防蠕变机制341-2和防蠕变机制342-3。
防蠕变机制341–1、防蠕变机制341-2和防蠕变机制342-3被配置为共同使用,以分别减少与变焦距致动模块106的轴承361–1、轴承361-2和轴承361-3相关的轴承蠕变。
防蠕变机制341-1、防蠕变机制341-2和防蠕变机制342-3可以由任何合适的材料制成,例如铝和各种其他金属和合金、各种陶瓷材料和/或各种塑料。
防蠕变机制341–1包括固定滑架槽311–1和运动控制槽312–1,防蠕变机制341–2包括固定滑架狭槽311–2和运动控制狭槽312–2,并且防蠕变机制341-3包括固定滑架狭槽311–3和运动控制狭槽312–3。
运动控制销392配置为在运动控制轴365-1处栓接到运动控制槽312,并且在运动控制槽内横向移动由每个运动控制槽的运动宽度限制的槽距离。移动宽度是移动控制槽312和固定滑架槽311的细长宽度。例如对于移动宽度为4毫米的移动控制槽312,移动控制销392配置为当可移动滑架352在第一方向368或第二方向369上成角度地移动防蠕变机制341时,在移动控制槽312内横向移动4毫米。
防蠕变机制341–1,固定滑架槽311–1定位为围绕固定滑架锚销391–1,使得当固定滑架锚销391突出穿过固定滑架槽311-1时,固定滑架锚销391-1固定并栓接到固定滑架槽3.11–1。
在一个实施例中,移动控制槽312–1定位为围绕移动控制销392–1,使得当移动控制销391–1突出穿过移动控制槽312-1时,移动控制销394–1固定并栓接到移动控制槽3.12–1。
由于运动控制销392固定在运动控制槽312–1中,并且固定支架锚定销391–1用作防蠕变机制341–1的锚定器,因此运动控制销391能够在第一方向368和第二方向369上成角度地移动防蠕变机制341-1。
防蠕变机制341–1在固定滑架351和可移动滑架352之间的定位使得固定滑架槽311–1栓接到固定滑架锚销391,并且运动控制槽312–1栓接至运动控制销392允许防蠕变机制341-1控制与轴承361–1相关联的轴承蠕变量。
类似,防蠕变机制341–2,固定滑架槽311–2定位为围绕固定滑架锚定销391–2,使得当固定滑架锚销391-2突出穿过固定滑架槽311-2时,固定滑架锚定销391-2固定并栓接到固定滑架槽3.11–2。
在一个实施例中,移动控制槽312–2定位为围绕移动控制销392–2,使得当移动控制销399–2突出穿过移动控制槽312-2时,移动控制销391–2固定并栓接到移动控制槽3.12–2。
由于运动控制销392–2固定在运动控制槽312–2中,并且固定支架锚销391–2用作防蠕变机制341–2的锚定器,因此运动控制销391-2能够在第一方向368和第二方向369上成角度地移动防蠕变机制341-2。
防蠕变机制341–2位于固定滑架351和可移动滑架352之间,使得固定滑架槽311–2连接到固定滑架固定销391–2,运动控制槽312–2连接至运动控制销392–2允许防蠕变机制341-2控制与轴承相关的轴承蠕变量。
类似,防蠕变机制341–3,固定滑架槽311–3定位为围绕固定滑架锚定销391–3,使得当固定滑架锚销391-3突出穿过固定滑架槽311-3时,固定滑架锚定销391-3固定并栓接到固定滑架槽3.11–3。
在一个实施例中,移动控制槽312–3定位为围绕移动控制销392–3,使得当移动控制销391–3突出穿过移动控制槽312-3时,移动控制销394–3固定并栓接到移动控制槽3.12–3。
由于运动控制销392-3固定在运动控制槽312-3中,并且固定支架锚销391-3用作防蠕变机制341-3的锚定器,因此运动控制销391-3能够在第一方向368和第二方向369上成角度地移动防蠕变机制341–3。
防蠕变机制341–3位于固定滑架351和可移动滑架352之间,使得固定滑架槽311–3连接到固定滑架固定销391–3,运动控制槽312–3连接至运动控制销392–3允许防蠕变机制341-3控制与轴承相关的轴承蠕变量。
除了栓接到固定滑架锚定销391和运动控制销392之外,防蠕变机制341定位在轴承座圈334组(轴承滑架销334)之间,使得防蠕变机制的轴承槽331围绕轴承361。
在一个实施例中,防蠕变机制341位于轴承滚珠滑架销334组之间,使得在防蠕变机制的任一侧都有间隙。例如,在每侧防蠕变机制341上的间隙可以是2毫米,或者允许防蠕变机制341在轴承滚珠滑架销334组之间成角度地移动的其它间隙量。
轴承滑架销334配置为在可移动滑架352沿第一方向368和第二方向369移动期间由变焦距致动模块106使用,从而支撑轴承361。
轴承滚珠滑架销334的长度和直径可以是允许变焦距致动模块106在第一可移动滑架边界321–1和第二可移动滑架边界321–2内移动可移动滑架352的长度和尺寸。例如,轴承滚珠滑架销334的长度可以是10毫米、20毫米,轴承滚珠支架销的直径可以是2毫米或3毫米。
在操作中,致动器305从电源(未示出)接收控制电流信号385,以将可移动滑架352从第一可移动滑架位置316移动到第二可移动滑架位317(沿第一方向368或第二方向369)。
当可移动滑架352从第一可移动滑架位置316移动到第二可移动滑架的位置317时,防蠕变机制341的轴承槽331包围的轴承361在可移动滑架353的方向上移动,或在轴承支架销334之间行进。
由于移动控制销392栓接到防蠕变机制341的移动控制槽312,因此当可移动滑架352从第一可移动滑座位置316移动到第二可移动滑台位置317时,防蠕变机制341在可移动滑架352的方向上成角度地移动,直到移动控制销392定位在第二移动控制销位置。
因为防蠕变机制341经由运动控制销392栓接到可移动滑架352,所以当运动控制销从第一运动控制销位置移动到第二运动控制销的位置时,可移动滑座352激活防蠕变机制,以防止与每个轴承361相关联的轴承蠕变发生。
当可移动滑架352在第一方向368或第二方向369上移动时,为了防止轴承361蠕变,防蠕变机制341构造为使得当可移动滑动架352的移动控制销392从第一移动控制销位置移动到第二移动控制销位置时,从轴承滚珠槽331的中心点到滚珠控制轴线349-1的距离(即防蠕变轴承滚珠距离)是运动控制销392的轴承滚珠控制距离的一半。
通过将轴承361限制在防蠕变轴承距离和使用轴承槽331定位轴承361,防蠕变机制341防止与每个轴承361a相关联的轴承蠕变发生,并减少头显101中轴承保持架蠕变的总量。
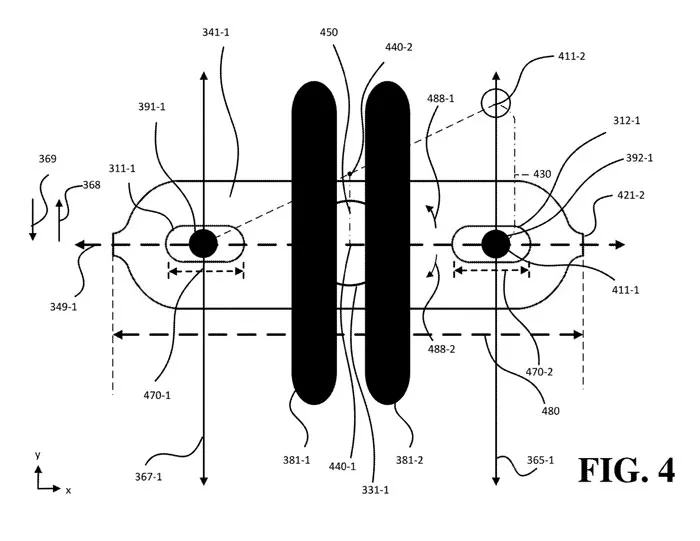
图4示出了防蠕变机制341–1,其包括与防蠕变系统309的防蠕变机制341相关的定位和尺寸信息。类似的定位和尺寸信息适用于防蠕变机制341–2和防蠕变机制341-3。
图示出了防蠕变机制341的防蠕变机制宽度480,其表示防蠕变机制341-1从防蠕变机制342-1的第一尖端421-1到防蠕变机制343-1的第二尖端421-2的细长宽度。
防蠕变机制宽度480可以是防蠕变机制341–1的宽度,而所述宽度允许固定滑架槽311、运动控制槽312和轴承槽331沿着防蠕变机制341的细长中心轴线水平定位,同时允许在第一方向368或第二方向369上相对于锚定轴线367(如图3C所示)的角运动488。防蠕变机制宽度480可以是例如200毫米、300毫米,或者其他宽度。
在一个实施例中,角运动488表示当可移动滑架352在第一方向368或第二方向369上运动时防蠕变机制341相对于锚定轴线367的角运动。角运动488表示当运动控制销392在运动控制轴365–1上从第一运动控制销位置411–1移动到第二运动控制销的位置411–2时,防蠕变机制341相对于锚定轴367的角运动。
例如,关于防蠕变机制341–1,角运动488–1表示当运动控制销392–1在运动控制轴365–1上从第一运动控制销位置411–1移动到第二运动控制销的位置411–2时,防蠕变机制341-1相对于锚定轴367–1的角运动。
当可移动滑架352在第一方向368上从第一可移动滑架位置316移动到第二可移动滑架位317时,移动控制销392-1在第一方向366上从第一移动控制销位置411-1移动到第二运动控制销位置411–2。
当可移动滑架352在第一方向368上移动时,运动控制销392-1将轴承控制距离430从运动控制销位置411-1移动到运动控制销的位置411-1。其中,轴承控制距离430是运动控制销392从第一运动控制销位置411–1移动到第二运动控制销的位置411–2的距离。
由于可移动滑架352移动运动控制销392移动轴承滚珠控制距离430,轴承槽331–1将防蠕变轴承滚珠距离450从滚珠控制轴线349–1上的轴承滚珠位置440–1移动到轴承滚珠位置440-2。其中,防蠕变轴承距离450是轴承控制距离430的距离的一半。
一旦轴承361定位在轴承位置440–2处,由于轴承361在轴承槽331–1中的定位,可防止轴承362在防蠕变轴承距离450处从轴承位置440-2处蠕变离开。换句话说,由于轴承361定位在槽防蠕变机制441内部,所以轴承362不会从防蠕变轴承距离450蠕变。
因此,通过防蠕变机制341的设计,防蠕变机制241防止了轴承361经历轴承蠕变。对于轴承361-2和轴承361-3,使用防蠕变机制341–2和防蠕变机制342–3可以防止类似的防蠕变。因此,防蠕变机制341–1、防蠕变机制341-2和防蠕变机制342-3防止在头显101的变焦距致动模块106中发生轴承蠕变。
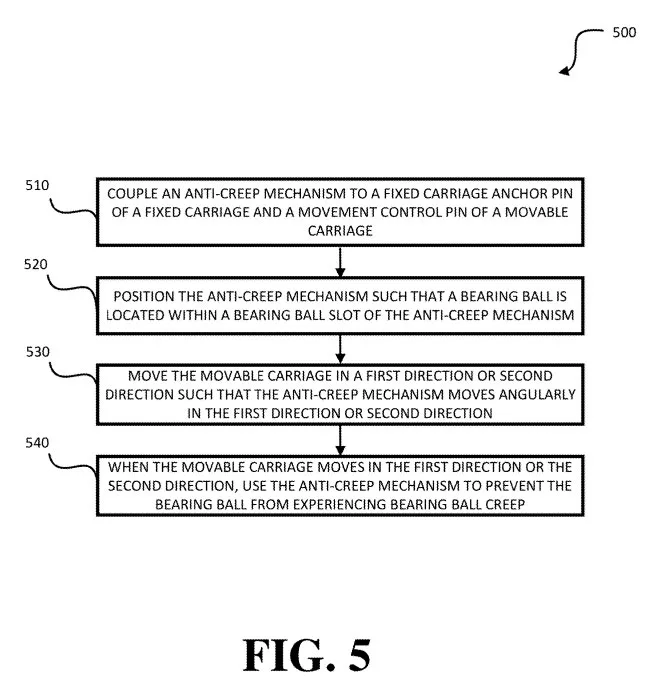
图5示出了过程500。
在510处,防蠕变机制341栓接到固定滑架352的固定滑架锚销391和可移动滑架352中的移动控制销392。除了控制头显中的光学模块104的移动之外,可移动滑架352同时使用移动控制销392控制防蠕变机制341的移动。
在520处,防蠕变机制341定位为使得轴承361位于防蠕变机制341’的轴承槽331内。轴承361位于轴承槽331内,以在可移动滑架352沿第一方向368或第二方向369移动时限制轴承361的运动。
在530处,使用移动控制销392使可移动滑架352在第一方向368或第二方向369上移动,使得防蠕变机制341在第一方向366或第二方向369上成角度地移动。
在540处,当可移动滑架352在第一方向368或第二方向369上移动时,防蠕变机制341防止轴承361经历轴承蠕变。换句话说,轴承361在轴承槽331内的定位,结合在可移动滑架352沿第一方向368或第二方向369移动期间防蠕变机制341的角运动和定位,可防止轴承361a具有相关联的轴承蠕变。
名为“Creep mitigation in ball-bearing systems”的Meta专利申请最初在2021年10月提交,并在日前由美国专利商标局公布。
......(全文 4982 字,剩余 0 字)








