2023年04月07日美国专利局新申请AR/VR专利摘选

文章相关引用及参考:映维网Nweon
一共更新了29篇专利。
(映维网Nweon 2023年04月07日)近期美国专利及商标局公布了一批全新的AR/VR专利,以下是映维网的整理(详情请点击专利标题),一共29篇。更多专利披露请访问映维网专利板块https://patent.nweon.com/进行检索,你同时可以加入映维网AR/VR专利交流微信群(详见文末)。
在一个实施例中,专利描述的系统可以识别VR环境中的共同用户;基于社交图信息来确定VR用户之间的社交相关性(例如社交关系类型);可以基于社交相关性来选择和/或确定VR环境内的共同用户的图形表示和/或其他能力;另外,可以使用所确定的图形表示类型(例如从VR用户的角度)在VR环境中显示共同用户。
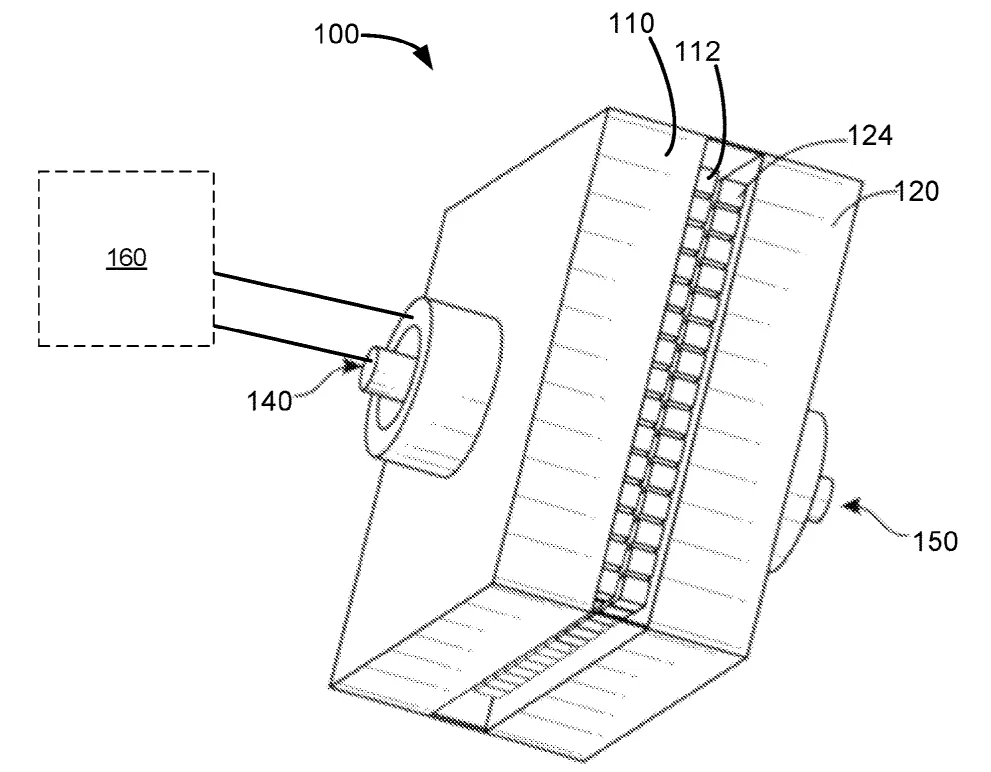
2. 《Meta Patent | Geometrical waveguide illuminator and display based thereon(Meta专利:几何波导照明器及其显示器)》
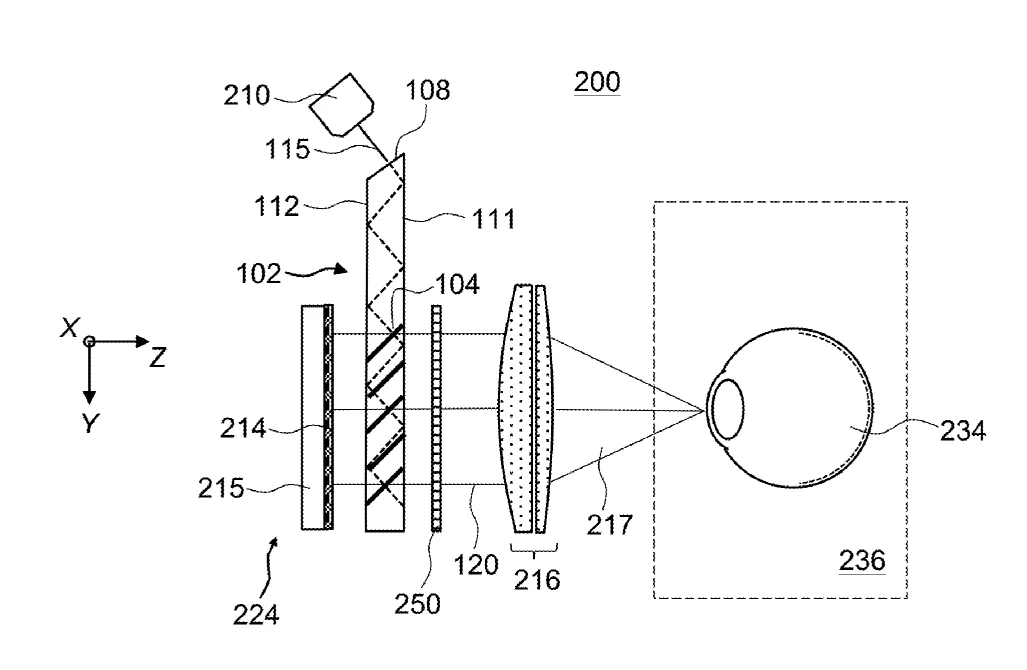
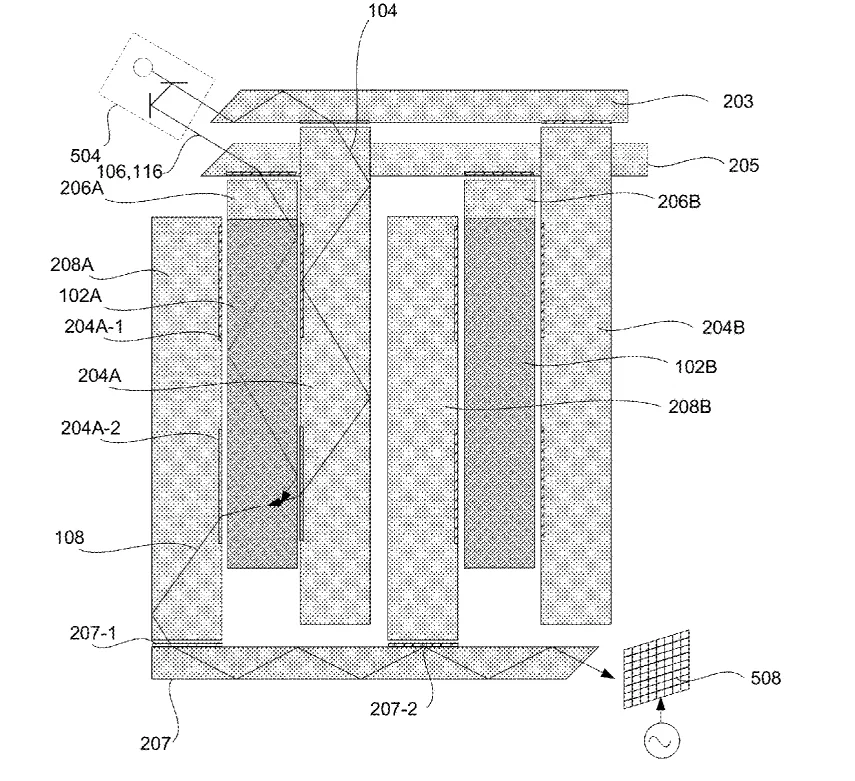
在一个实施例中,一种用于照明显示面板的照明器包括具有掩埋倾斜体反射器阵列的光导,而阵列通过光导表面之一向外耦出在光导中传播的光束部分。分束倾斜表面可以用于提供偏振输出。这样的照明器可以与通过偏振操作的反射显示面板一起使用。分束倾斜表面作为偏振器工作并提供偏振照明光。由反射面板反射的光可以通过照明器传播回来,并且分束倾斜表面可以用作分析器。
3. 《Meta Patent | Enhanced artificial reality systems(Meta专利:优化的人造现实系统)》
在一个实施例中,专利描述的方法包括从用户接收用户信号;基于接收到的信号确定用户意图,在一个或多个可用的用户设备中选择需要执行一个或更多个功能以实现所确定的用户意图的用户设备;访问与所选择的用户设备相关联的当前状态信息;根据当前状态信息将由所选择用户设备执行的一个或多个第一命令以实现所确定的用户意图,并且将所述一个或一个以上第一命令中的一个发送到所述用户设备。
4. 《Meta Patent | Noise-reduction circuit for an image sensor(Meta专利:用于图像传感器的降噪电路)》
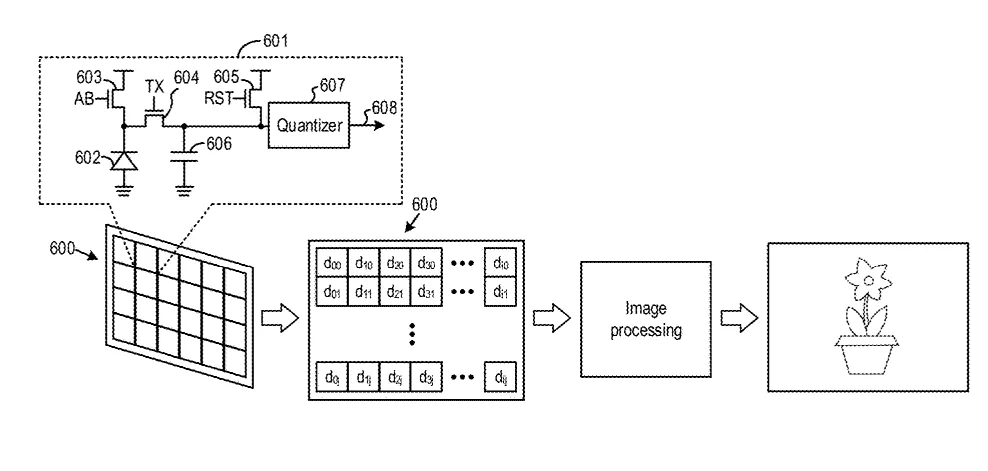
在一个实施例中,专利描述的降噪电路可以包括参考帧生成器,参考帧生成器配置为基于在校准阶段期间从图像传感器接收的一组图像帧来生成参考帧。降噪电路同时可以包括耦合到参考帧生成器的存储器。存储器可以从参考帧生成器接收参考帧,并且存储参考帧以供在降噪阶段期间后续使用。降噪电路可以进一步包括耦合到存储器的处理器。处理器可以从存储器中检索参考帧,并且在降噪阶段期间使用参考帧来减少从图像传感器接收的图像帧中的噪点。
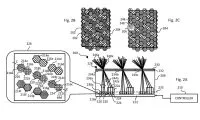
在一个实施例中,专利描述的光学变压器包括多个光发射器、多个光伏电池,所述多个光伏电池被定位成接收来自所述多个子集的光,所述光发射器的至少第一子集包括第一光伏电池和第二光伏电池,以及一个或多个光学触发开关,其定位为接收来自所述多个光发射器的至少第二子集的光,所述一个或更多个光学触发开关包括电耦合到所述第一光伏电池和所述第二光伏电池的至少第一光学触发的切换器。
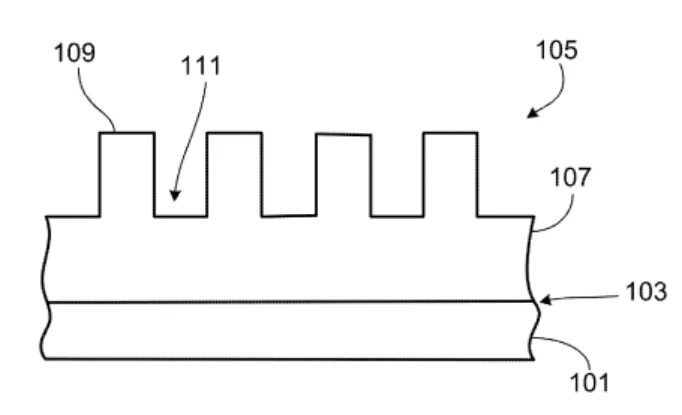
在一个实施例中,专利描述了配置光学层的压印光刻方法。所述方法包括,选择要应用到基板上的纳米层的一个或多个参数,以改变基板的有效折射率,并将纳米层压印在基板上,以改变基板的有效折射率。可透过基板的相对光量改变选定量。
8 《Magic Leap Patent | Cross reality system with wifi/gps based map merge(基于WiFi/GPS的映射合并)》
在一个实施例中,跨现实系统接收追踪映射中的追踪信息和与追踪映射至少一部分相关联的第一位置元数据。至少部分地基于第一位置元数据和与标准映射子部分相关联的第二位置元数据之间的对应关系来确定标准映射的子部分。标准映射的子部分可以和追踪映射的至少一部分合并成合并映射。跨现实系统可以通过至少使用来自一个或多个图像的姿态信息来进一步生成追踪映射,并且至少通过使用标准映射中的持久坐标帧和与位置元数据来将追踪映射定位到标准映射。
9. 《Magic Leap Patent | Light Field Display Metrology(Magic Leap专利:光场显示测量学)》
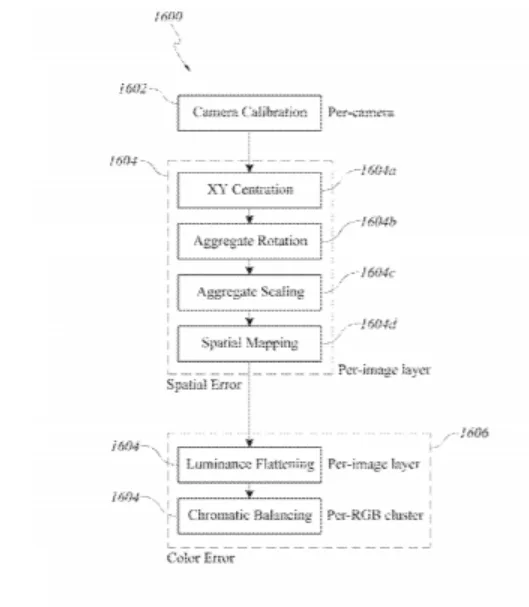
在一个实施例中,专利描述了一种用于显示器的光场测量系统。光场测量可以捕获投射光场的图像,并使用捕获图像确定光场各个区域的焦深。然后可以将确定的焦深与预期的焦深进行比较,从而量化显示器的瑕疵。根据测量的瑕疵,可以对光场执行适当的误差校正。
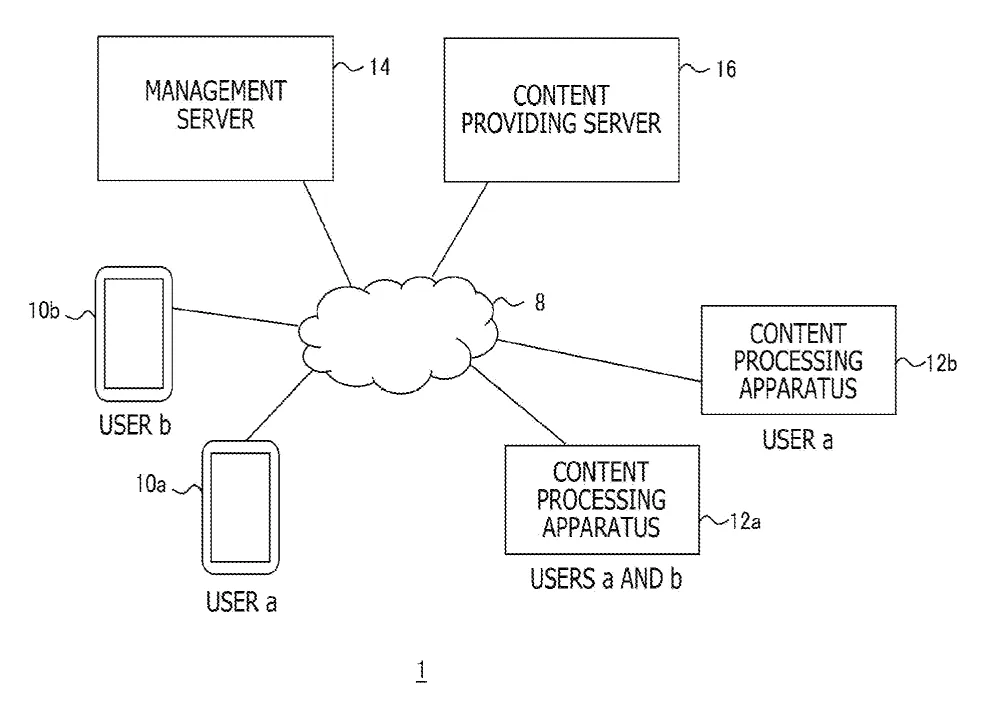
在信息处理设备的存储区域不足以用于要下载的数据的情况下,信息终端显示缺少的存储空间的大小和存储区域中存储的数据的列表,并且接受用户对要删除的数据的选择。如果期望该选择解决存储空间不足的问题,则信息终端接受删除请求,并向管理服务器发出删除请求,以实现目标数据的删除。
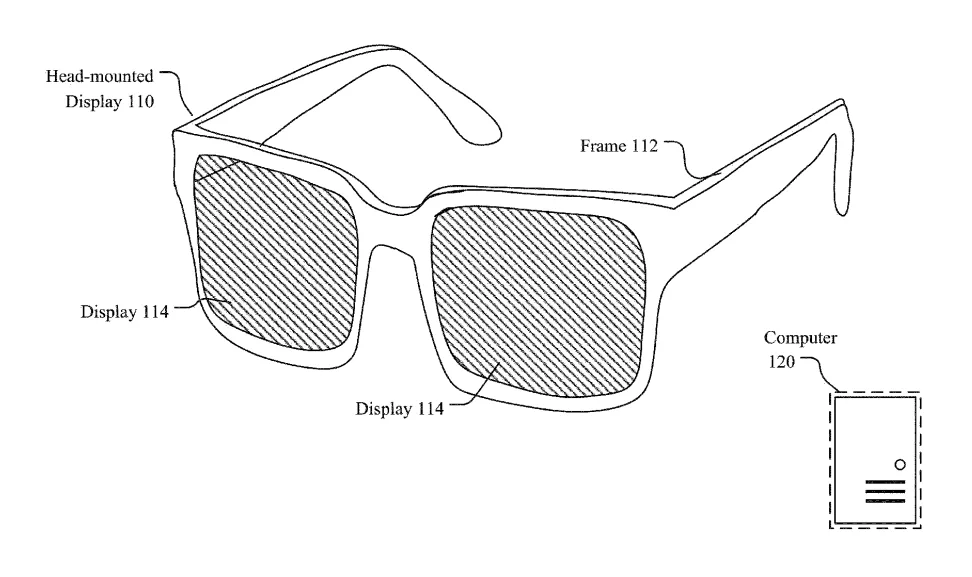
11. 《Samsung Patent | Display device and electronic device including the same(三星专利:显示组件和包括所述组件的电子设备)》
在一个实施例中,专利描述的显示设备包括硅基板;半导体层,所述半导体层设置在所述硅基板上并且包括像素电路;图像传感器,所述图像传感器在所述硅基板上并且基于成像指令被激活;发光元件,所述发光元件设置在所述半导体层上并且电连接到所述像素电路;以及显示驱动器,其电连接到像素电路以控制像素电路,并控制其中图像传感器被激活的成像帧的图像亮度。
在一个实施例中,专利描述的电子设备包括配置为输出图像的显示设备、配置为向用户视窗提供与从显示设备输出的图像相对应的光的视差光学元件、以及处理器。所述处理器配置为基于视窗与由显示设备和视差光学元件形成的虚像平面之间的向下视角的变化来调整所述视差视觉元件的参数。
13. 《Samsung Patent | Brightness adjustment method and hmd device(三星专利:亮度调整方法和头显设备)》
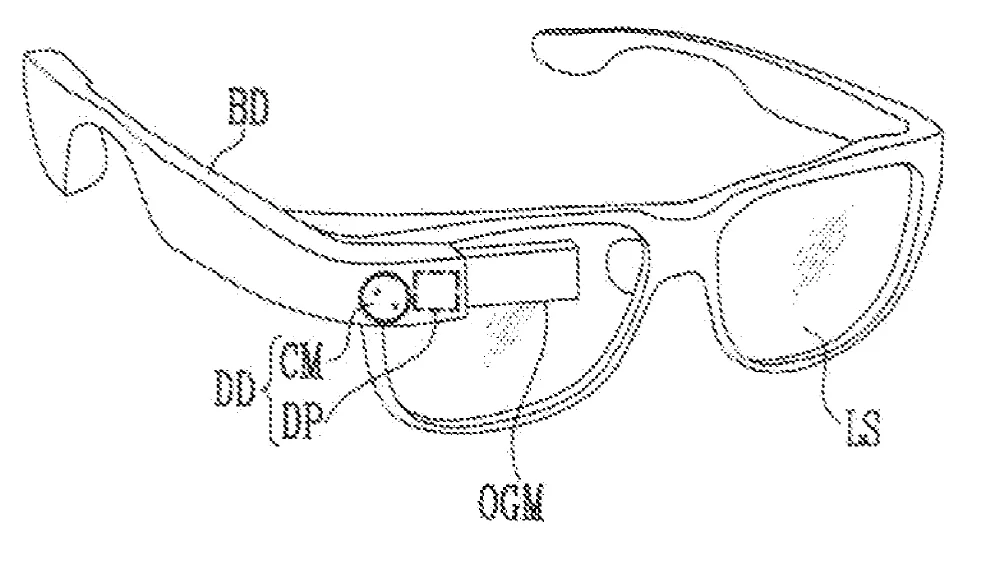
在一个实施例中,专利描述的电子设备包括至少一个处理器和无线连接到至少一个微处理器的头显设备。所述至少一个处理器包括第一通信模块、发光器件和第一处理器,所述第一处理器用于基于从头显接收的亮度调节信号来控制发光器件的亮度。头显包括第二通信模块、用于测量外部照度的传感器和用于获取由传感器测量的外部照度的第二处理器,并且基于所获得的外部照度发送亮度调整信号,以用于调整至少一个处理器的发光器件的亮度。
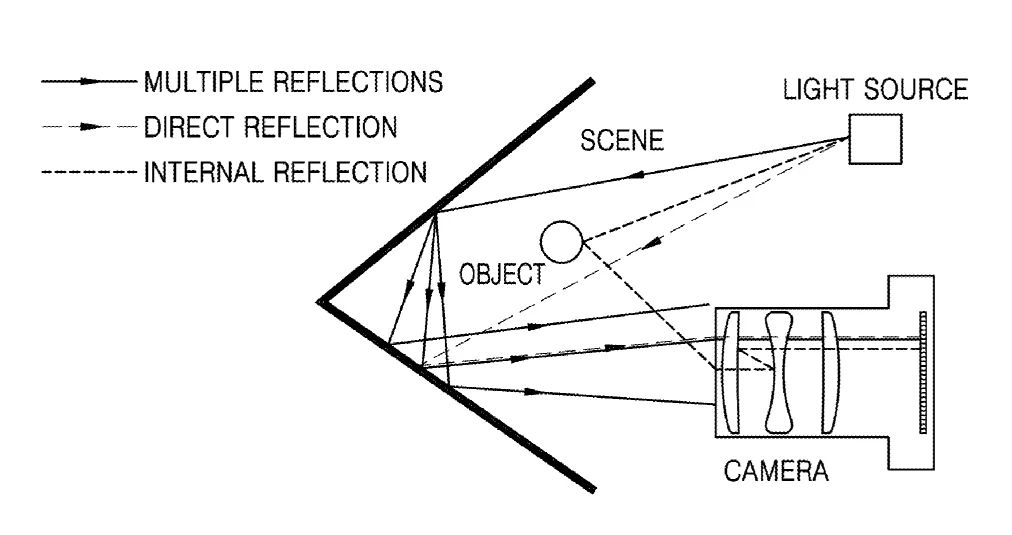
在一个实施例中,专利描述的方法包括通过至少两个光源同时照明场景,每个光源发射具有空间图案、波长和/或偏振的结构化光,其中每个结构化光的空间图案、波段和/或偏振光分别彼此不同;由成像传感器通过滤波器阵列捕获由所述至少两个光源同时照射的场景的图像,其中所述成像传感器的一个像素通过所述滤波器阵列的一个滤波器捕获所述图像;针对每个像素计算,像素从为每个联合像素编译的方程组中接收的光的直接分量和全局分量的强度值,并通过将其计算的直接分量的强度数值分配给每个像素来对每个像素执行图像校正,从而获得校正的图像。
在一个实施例中,专利描述的计算机系统在相对于三维环境的第一位置处显示警报,其中警报至少部分地与第一视图中的第一对象重叠。第一位置与用户具有各自的空间关系。计算机系统检测用户从第一视点到第二视点的移动。在第二视点,计算机系统根据警报是第一类型警报的确定,在三维环境中的第二位置显示警报,第二位置与用户具有相应的空间关系,并且根据警报是第二类型警报的判断,从第二视点显示三维环境,而不向用户显示具有相应空间关系的警报。
16. 《Microsoft Patent | Optical data transfer(微软专利:光学数据转移)》
在光学数据传输系统中,光束调制器配置为将一组数据嵌入输入光束中。多模光波导网络具有用于接收输入光束的耦入区域。多模光波导网络配置为将输入光束引导到多模光波导网的耦出区域。空间相干检测器配置为测量多个位置处的输出光场的相位和振幅。输出光场至少部分地由输入光束限定,并且因此表现出由光束通过多模波导网络引起的失真效应。将信号处理应用于空间相干检测器的输出,以补偿失真效应,从而从空间相干检测器输出恢复嵌入输入光束中的数据集。
17. 《Microsoft Patent | Low power efficiency rf facial movement detection scheme(微软专利:低功耗射频面部运动检测方案)》
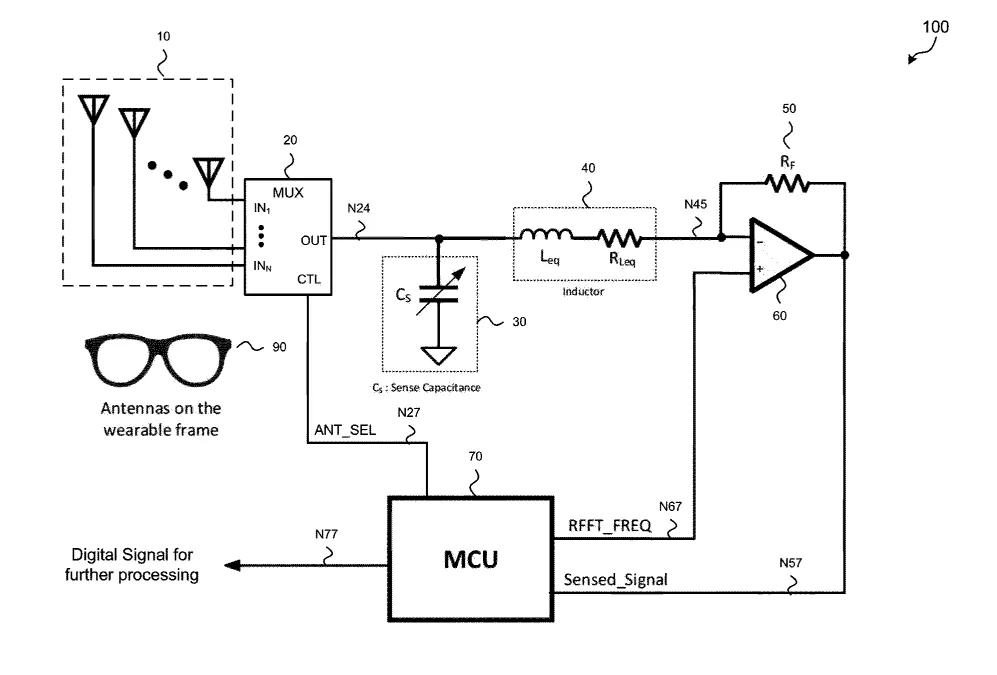
在一个实施例中,专利描述的系统包括脉冲驱动器,脉冲驱动器在低于电池电压的情况下操作时以设定频率产生脉冲信号。LC滤波器接收脉冲信号,并基于与天线相关联的电容值产生瞬态响应。基于天线到用户皮肤的变化距离,天线的电容响应于用户的面部运动而变化。耦合电容器AC将LC滤波器的输出耦合到其他系统组件,其中LC滤波器的AC耦合输出包括响应于用户的面部运动的LC滤波器的检测信号幅度和检测信号相位。
18. 《Microsoft Patent | Monitoring an emission state of light sources(微软专利:监测光源的发射状态)》
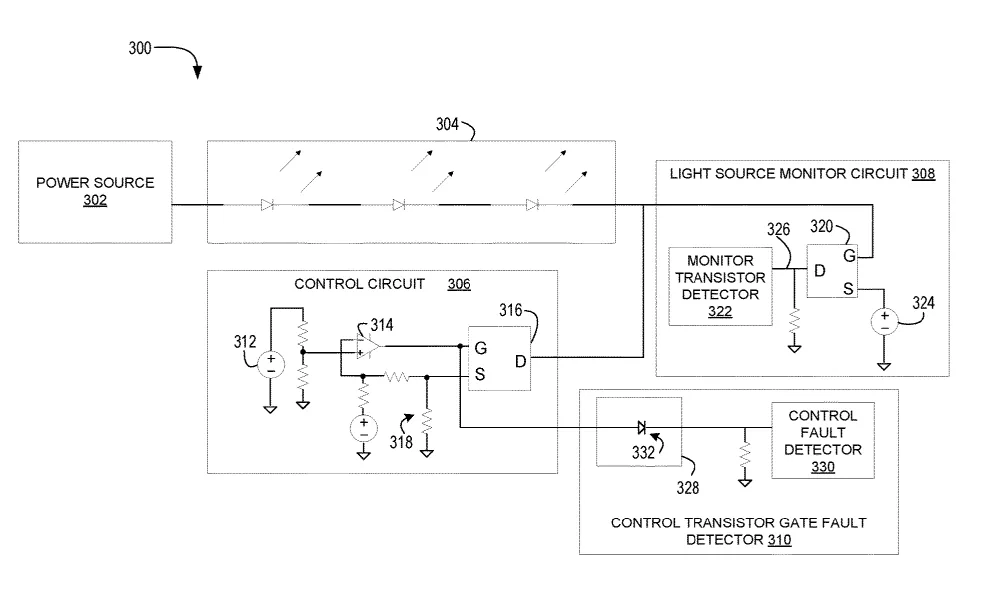
在一个实施例中,专利描述的发光电路包括电源、连接到电源的输出的一个或多个光源、以及包括脉冲电压源和控制晶体管的控制电路。控制晶体管配置为基于脉冲电压源的输出来调节通过光源的电流。所述发光电路同时包括监控晶体管和监控晶体管检测器,所述监控晶体管包括连接到光源的输出的栅极,使得光源的输出处的电压控制监控晶体管的输出。所述监控器晶体管检测器连接到监控晶体管的输出。监控晶体管检测器配置为基于监控晶体管的输出的状态来监控一个或多个光源的状态。
19. 《Snap Patent | Surfacing augmented reality objects(Snap专利:呈现增强现实对象)》
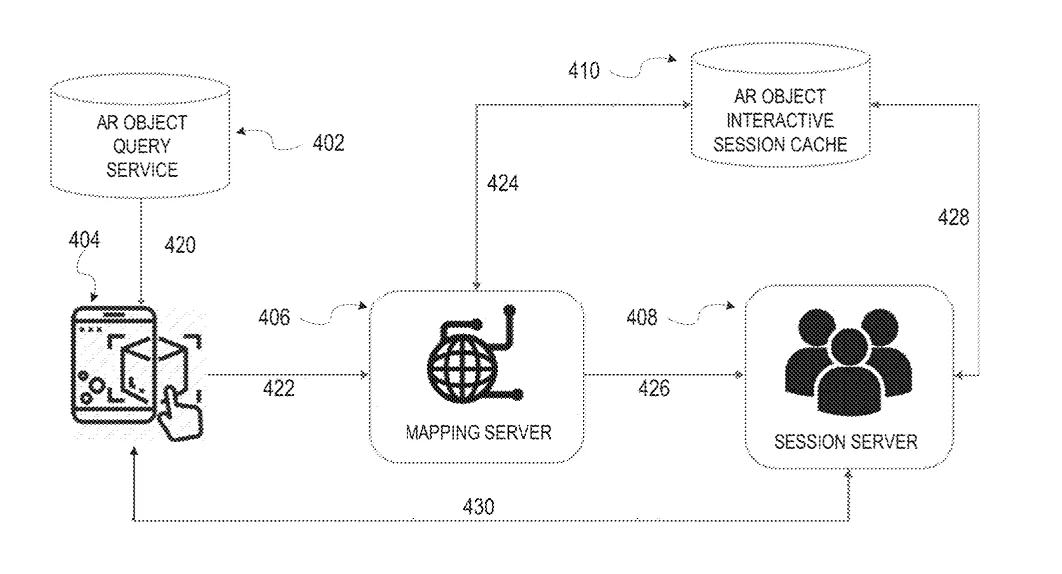
在一个实施例中,专利描述了用于AR对象的注册表,其可以向客户端设备提供AR对象以支持各种软件或硬件应用。例如,AR对象注册表有助于或使得能够注册与地球上的一个或多个位置相关联的一个或者多个AR对象。
20. 《Snap Patent | Ar odometry using sensor data from a personal vehicle(Snap专利:使用个人车辆传感器数据的AR里程计》
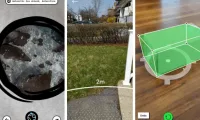
在一个实施例中,专利描述的方法包括通过对可佩戴增强现实设备生成的图像和惯性测量单元数据执行的视觉惯性里程计来确定初始姿势。从个人移动系统发送的传感器数据被接收,并且传感器融合被对从个人移动设备接收的数据执行,以提供更新的姿势。然后,基于更新的姿势在可穿戴增强现实设备显示增强现实效果。
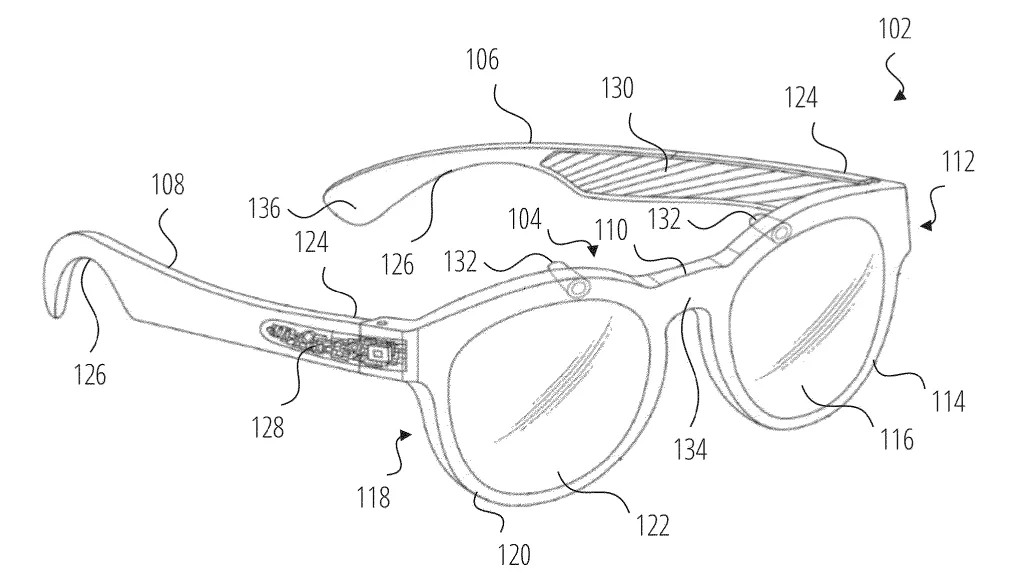
21. 《Snap Patent | Augmented reality beauty product tutorials(Snap专利:AR美容产品教程)》
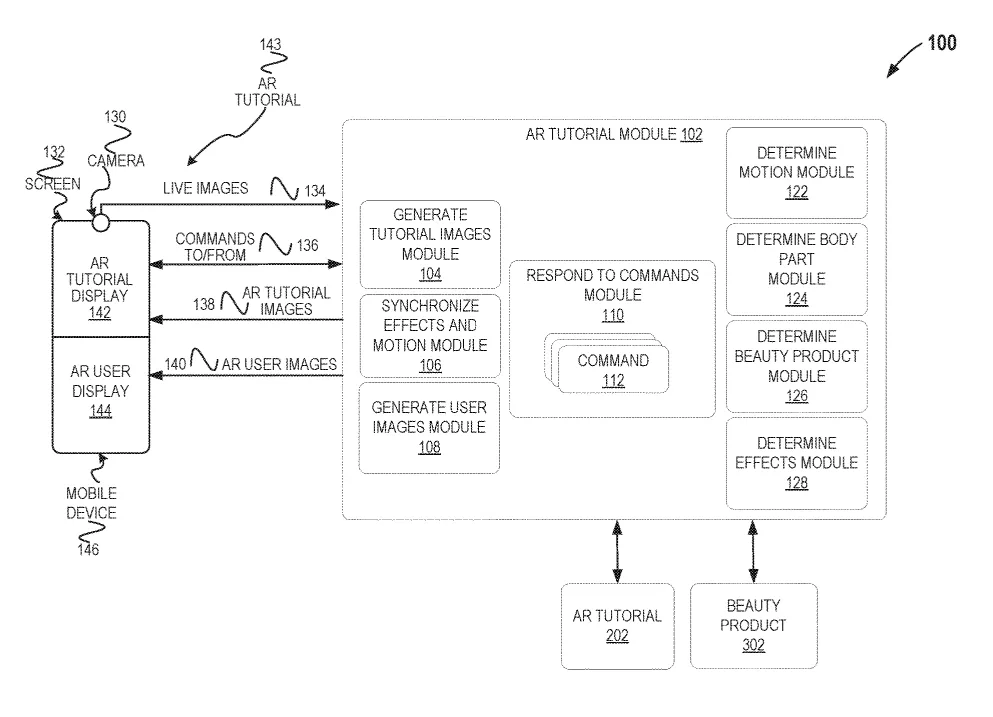
在一个实施例中,专利i描述的方法公在屏幕的第一部分显示美容产品教程。美容产品教程包括演示者将美容产品应用于演示者的身体部位的预记录图像,其中所述第一效果是基于第二效果来确定,而所述第二效果指示将所述美容产品应用于所述呈现者的身体部位对所述预记录图像的改变。在一个实施例中,处理用户的实时图像以添加美容产品的第一效果和指示,以及在屏幕的第二部分显示处理后的用户的实时照片。
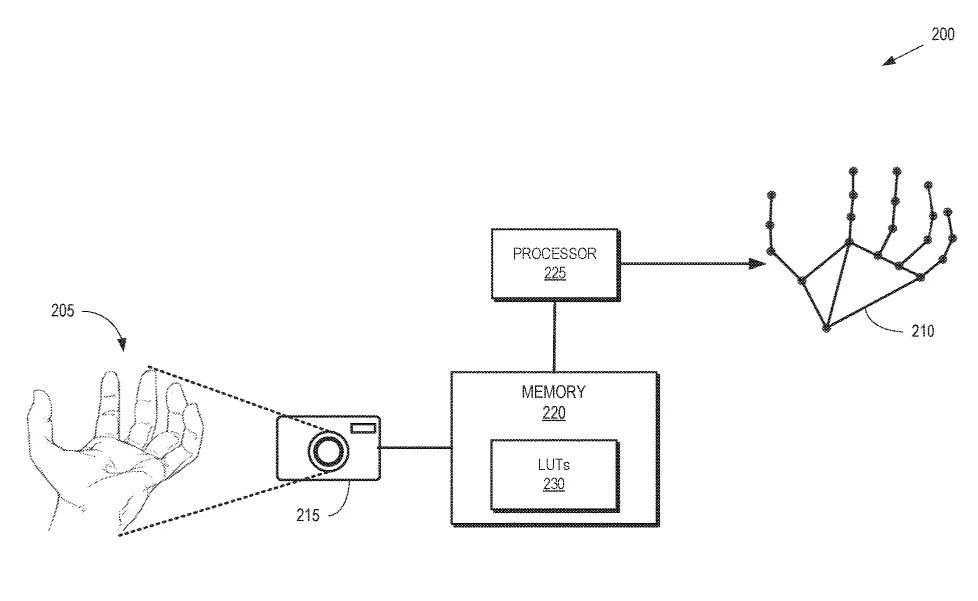
在一个实施例中,处理器在摄像头2D图像中识别手上的关键点。使用关键点的位置来访问查找表LUT来确定手的3D姿势关键点包括指尖和拇指的位置、连接手指和拇指的指骨的关节、表示手指和拇指到手掌的附接点的手掌指关节,以及指示手到前臂的附接点。LUT将手指和拇指在对应手指姿势平面中的2D坐标表示为手指或拇指尖端相对于对应手掌指关节的位置的函数。
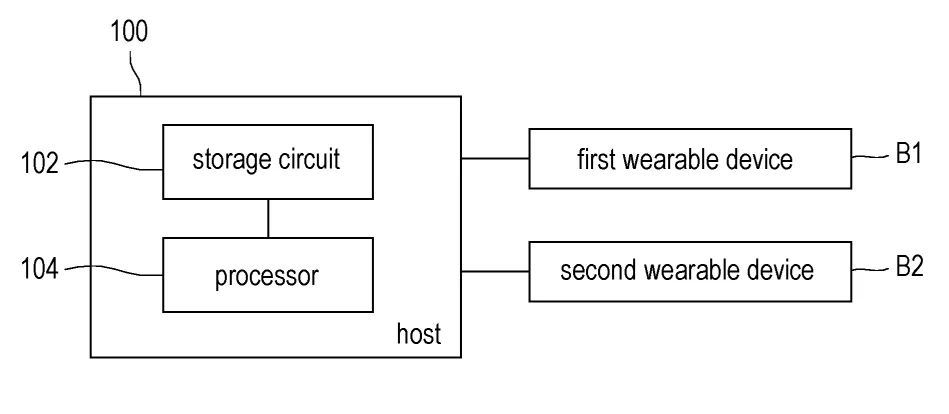
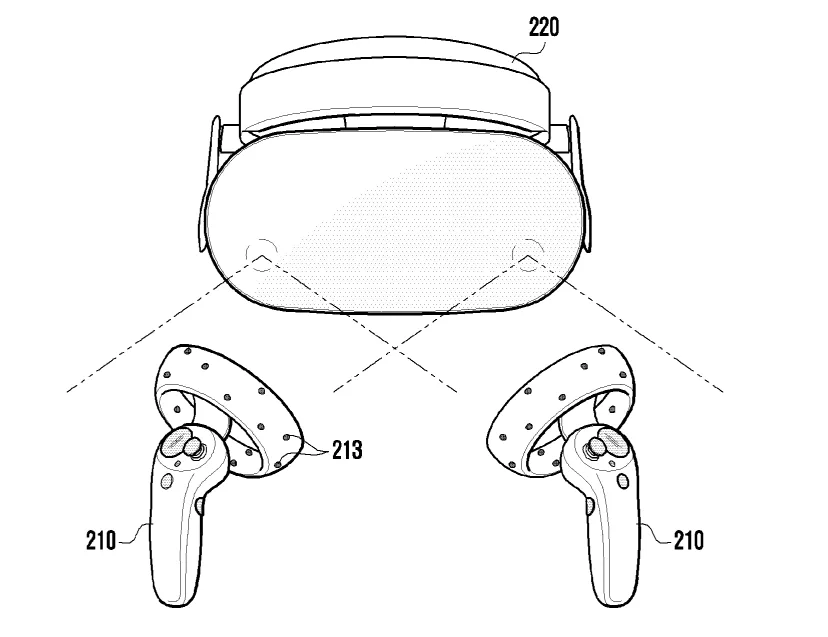
本公开提供了一种用于确定用户的姿势的方法、主机和计算机可读介质。该方法包括:检测第一可穿戴设备和第二可穿戴设备之间的相对位置;以及响应于确定所述第一可穿戴设备和所述第二可穿戴设备之间的相对位置满足预定的相对位置,至少基于所述第一可穿戴设备和第二可佩戴设备之间的所述相对位置来确定所述用户的姿势。
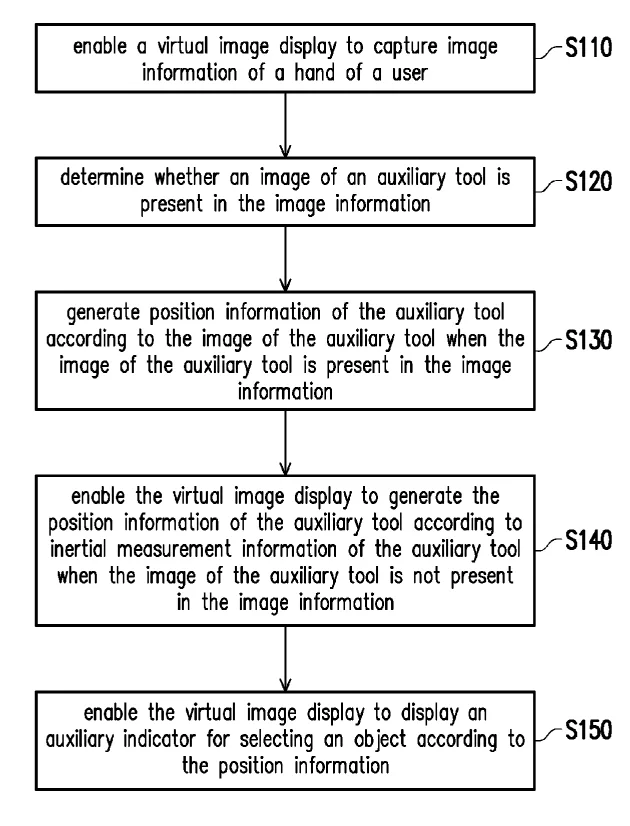
在一个实施例中,专利描述的虚拟图像的对象选择方法包括:使虚拟图像显示器能够捕捉用户手部的图像信息;确定辅助工具的图像是否存在于图像信息中;当辅助工具的图像存在于图像信息中时,根据辅助工具的所述图像生成辅助工具的位置信息;当辅助工具的图像不存在于图像信息中时,虚拟图像显示器能够根据辅助工具的惯性测量信息生成辅助工具的位置信息;并且所述虚拟图像显示器能够显示用于根据所述位置信息选择对象的辅助指示符。
在一个实施例中,专利描述的设备包括配置为存储点云数据的存储器,以及通信地耦合到存储器的一个或多个处理器。一个或多个处理器配置为确定点云数据的参考点云帧中的至少两个参考点。所述一个或多个处理器配置为将半径插值应用于所述至少两个参考点,以获得所述点云数据的当前点云帧中的至少一个当前点的至少一种半径间预测器。处理器配置为基于至少一个半径间预测器来对当前点云帧进行编码。
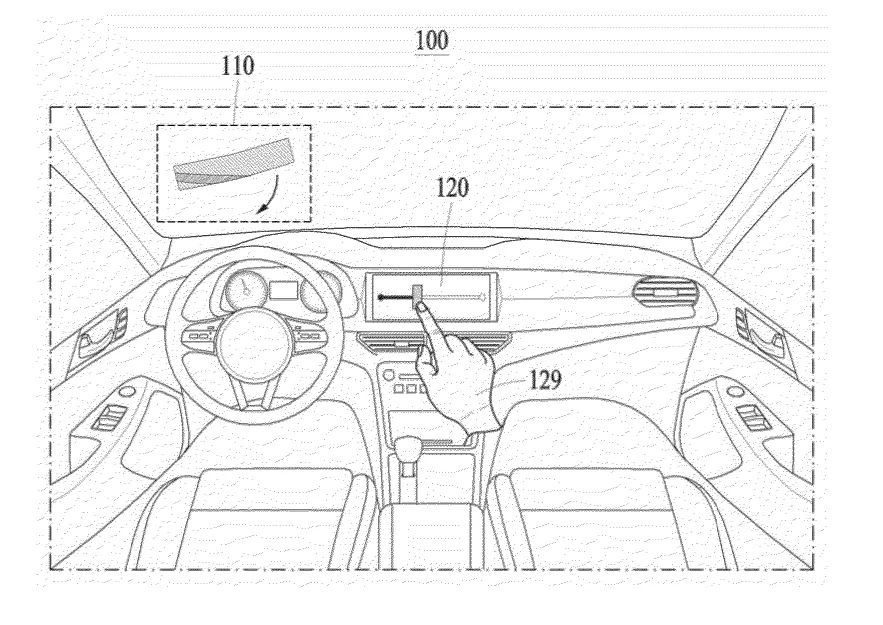
专利描述了将诸如AR)备之类的移动设备与车辆操作集成的系统。在一个实施例中,专利描述的方法可以包括:基于车辆内部的一个或多个图像,确定移动设备相对于车辆坐标系的姿态;确定所述车辆的乘员的状态;以及向车辆发送指示乘员的状态和移动设备相对于车辆坐标系的姿势的数据。
27. 《Qualcomm Patent | Distribution of application computations(高通专利:分布式应用计算)》
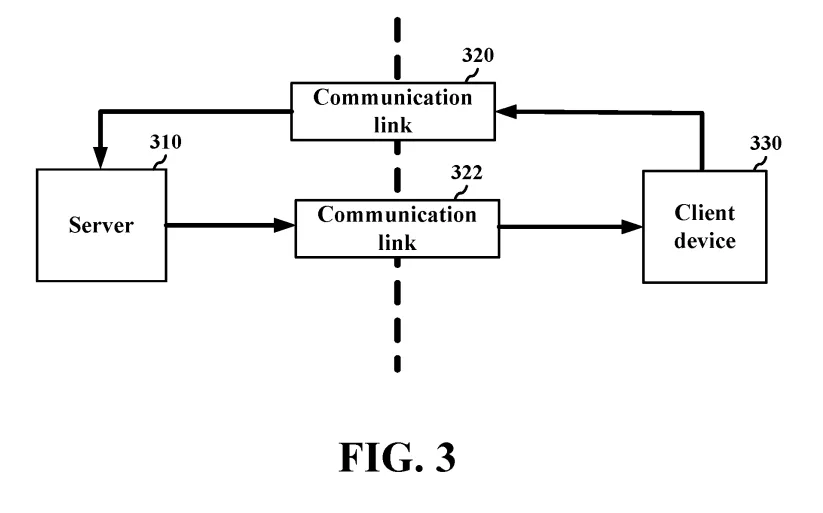
在一个实施例中,专利描述的方法确定用于客户端设备和服务器之间的通信的通信链路的质量、延迟或容量中的至少一个;确定客户端设备和服务器之间的应用计算的计算负载;基于应用计算的计算负载或通信链路的质量、延迟或容量中的至少一个来调整客户端设备和服务器之间的应用计算的运算分布;另外,可以确定客户端设备或服务器中的至少一个的计算能力。
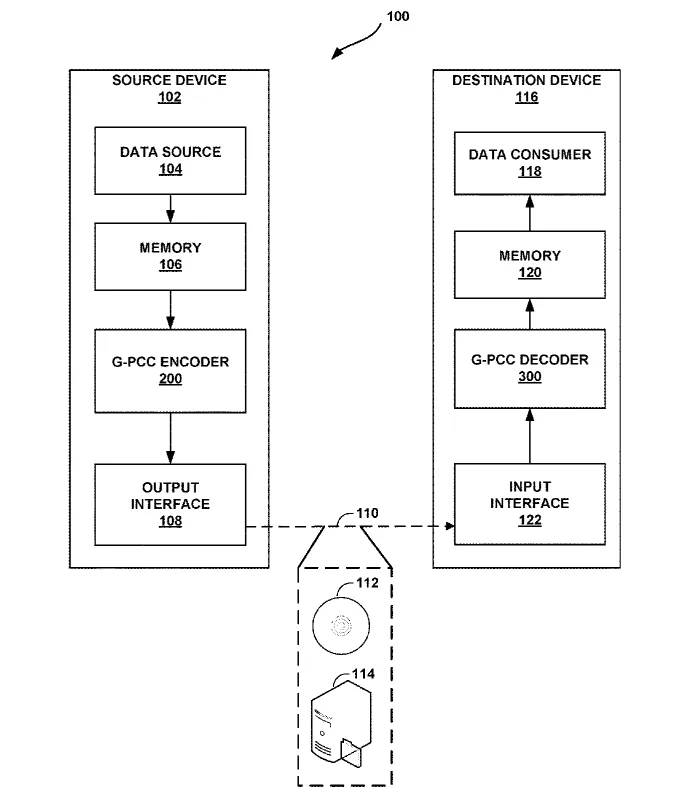
28. 《Qualcomm Patent | Planar and direct mode signaling in g-pcc(高通专利:G-PCC中的平面和直接模式信令)》
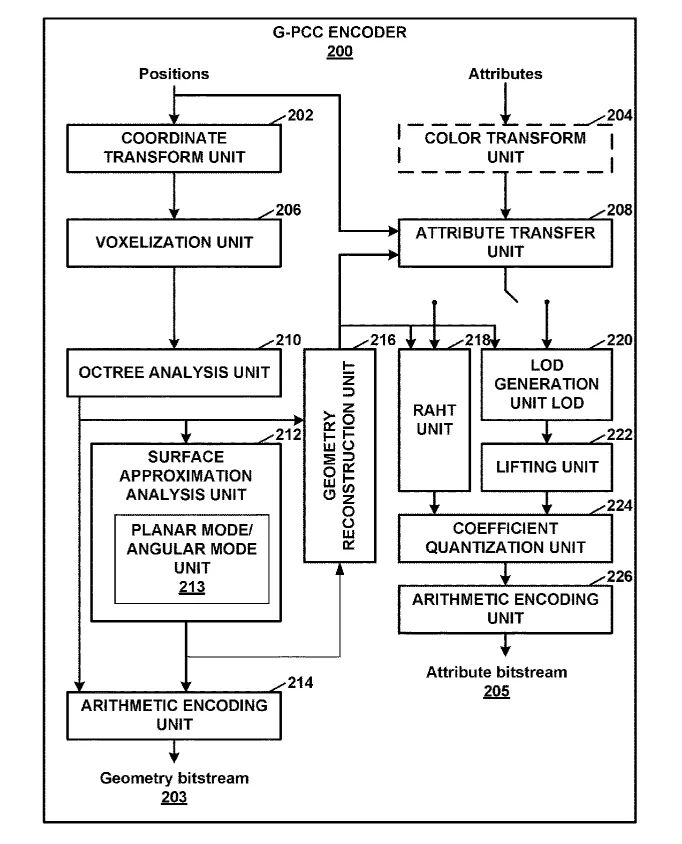
在一个实施例中,专利描述了一种对点云数据进行编码的方法。在一个或多个示例中,当启用角度模式时,可以禁用平面模式。作为一个例子,G-PCC编码器或G-PCC解码器可以在启用角度模式的所有情况下禁用平面模式。例如,如果语法元素(例如第一语法元素)指示启用了角度模式,则需要禁用平面模式。作为另一示例,G-PCC编码器可以用信号发送语法元素(例如第二语法元素),其中所述语法元素指示当启用角度模式时是启用还是禁用平面模式。
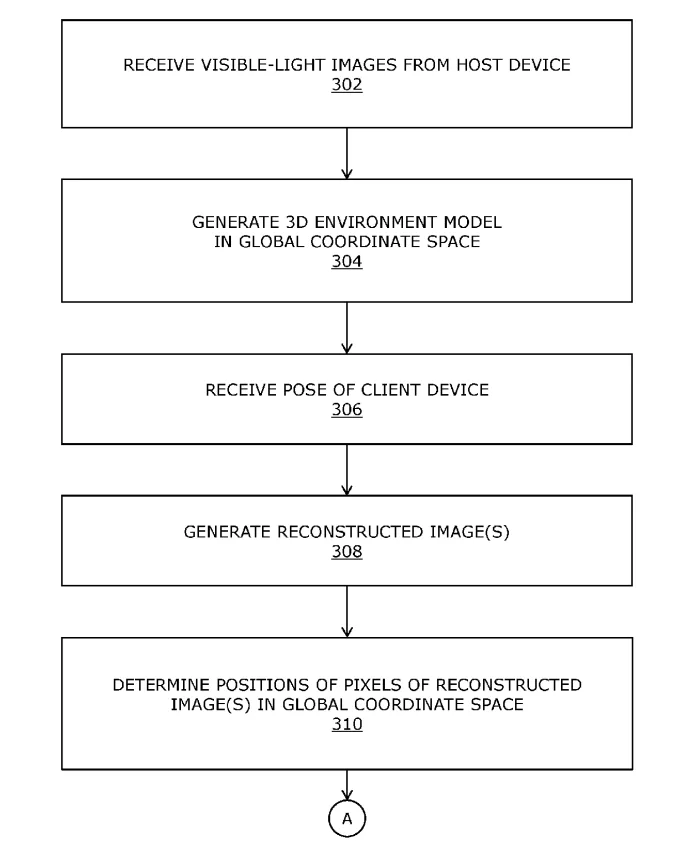
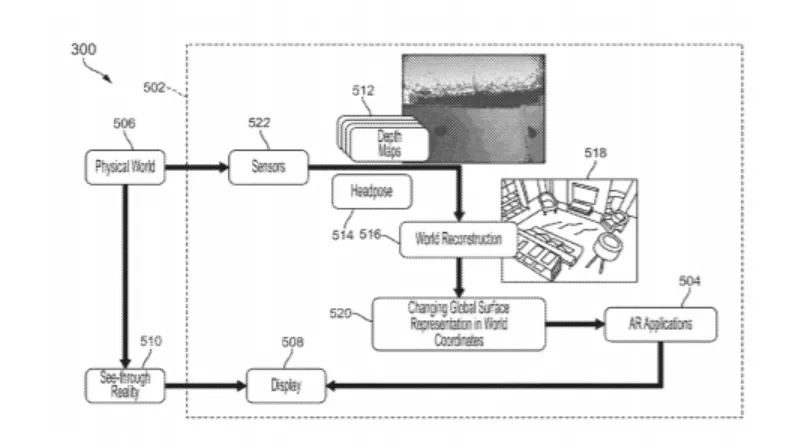
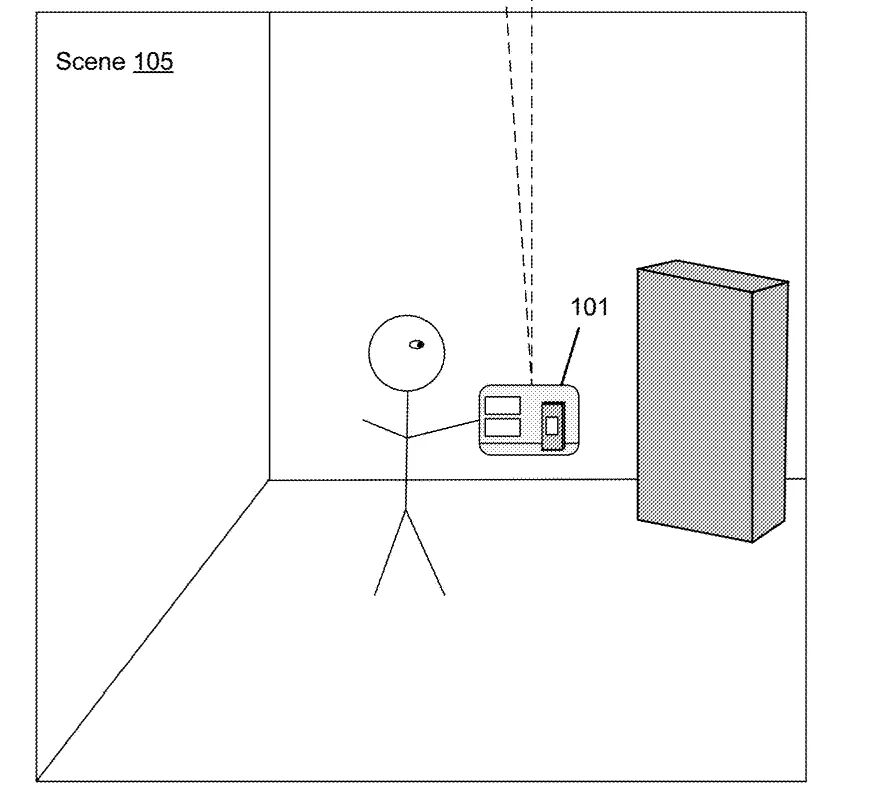
在一个实施例中,专利描述的服务器配置为:从主机设备接收由可见光摄像头捕获的真实世界环境的可见光图像;处理可见光图像以生成3D环境模型;从客户端设备接收指示客户端设备的姿势的信息;利用3D环境模型来生成重建的图像和重建的深度图;确定重建图像的每个像素的位置;从主机设备接收当前可见光图像;从主机设备接收指示主机设备的当前姿势的信息,或者确定所述当前姿势;对于重建图像的像素,确定当前可见光图像中是否存在对应的像素;当当前可见光图像中存在对应像素时,将重构图像中像素的初始像素值替换为当前可见光图中对应像素的像素值;并将重建的图像发送到客户端设备。
......(全文 5541 字,剩余 0 字)