Meta提出非接触式REM检测方法测量眼睛运动

使用非接触式超声传感器或其他距离传感器(例如LIDAR)来测量眼睛运动
(映维网Nweon 2023年01月17日)人的整个睡眠过程可以分为5个阶段,在不同的睡眠阶段脑电波有不同形态的变化。睡眠的最后一个阶段是快速动眼,其中失眠者眼球有快速跳动的现象,同时呼吸和心跳变得不规则,肌肉完全瘫痪,并且很难唤醒。
快速眼动(Rapid Eye Movement;REM)是深度睡眠的一个指标。用于测量REM睡眠的一种方法可以是眼电图(EOG),而EOG一般需要传感器接触眼周皮肤。
在名为“Non-contact rapid eye movement (rem) monitoring”的专利申请中,Meta就提出了一种非接触式的REM检测方法。
概括来说,Meta主要是使用非接触式超声传感器或其他距离传感器(例如LIDAR)来测量眼睛运动。其中,当眼睛闭合时,眼睛旋转(运动)会令眼睑变形。由于眼睛是非球形(角膜突出),所以可以通过感测闭合眼睑来感测眼睛在闭合眼睑下的运动。
通过使用非接触式超声传感器或LIDAR传感器阵列,可以在没有传感器接触眼睛的情况下测量眼睑下角膜的运动。超声传感器或其他非接触传感器可以嵌入睡眠眼罩之中,并且由传感器阵列产生的距离测量可以发送到处理单元进行记录和/或分析。

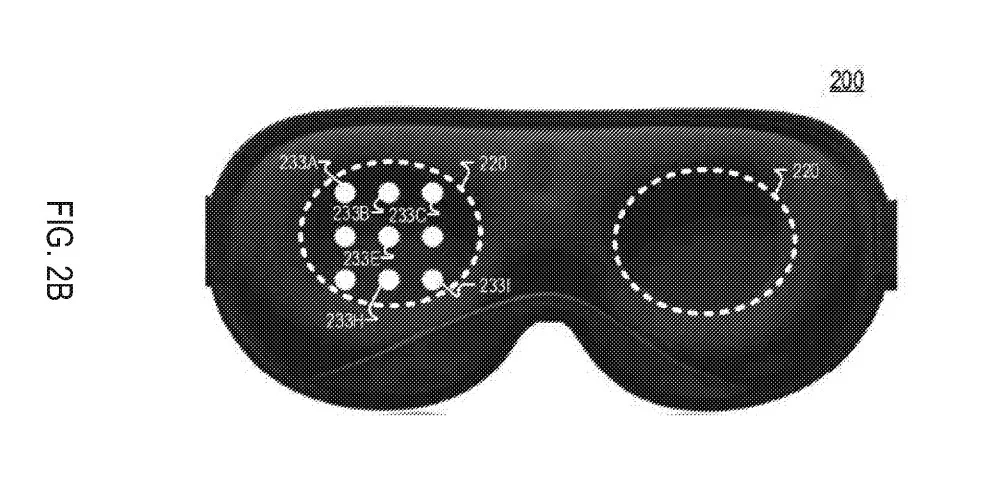
图2A示出了示例性眼罩200,眼罩200包括凹槽220。在图2B中,传感器阵列233A-2331设置在凹槽中。传感器可以是机载超声传感器或其他距离传感器。在其他实施方式中,阵列中可以包括更多或更少的传感器233。传感器233定向为向佩戴眼罩200的用户发射发射信号。
然后可以由传感器接收返回信号(从眼睛反射),并且可以基于返回信号确定到眼睑(围绕眼睛成形)的距离。电池、处理逻辑、通信收发器和其他电子部件(未示出)同样可以包括在眼罩200中。
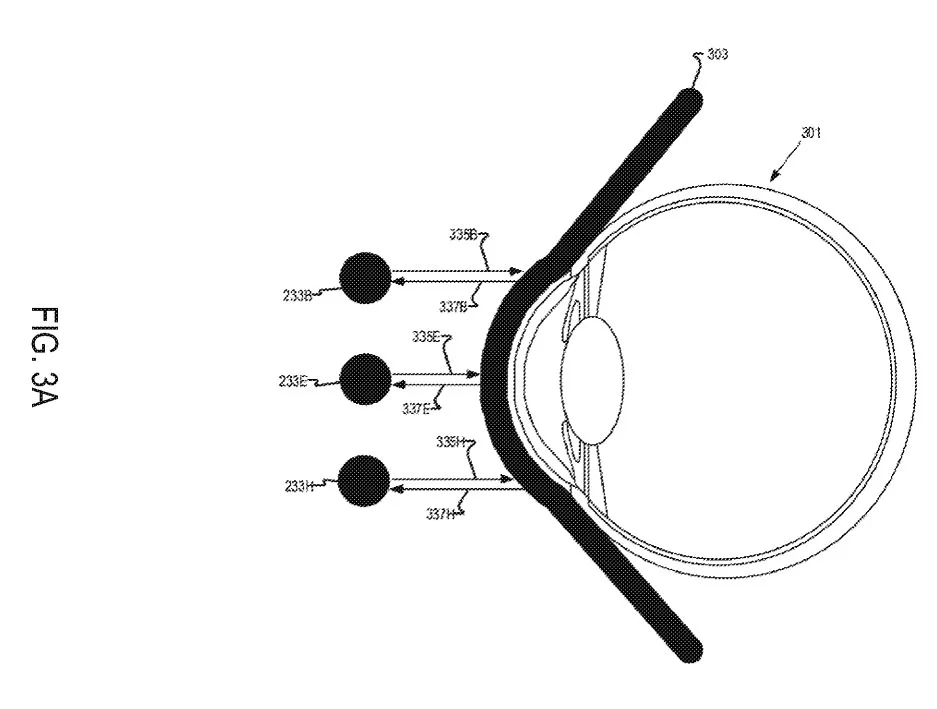
图3A示出了阵列中的传感器233B、233E和233H向眼睛301发射发射信号335并接收从眼睑303反射的返回信号337。其中,眼睑303可以围绕眼睛301成形。因此,每个传感器233测量到眼睑303的距离。在图3A中,眼睛301可以定位在前向方向。
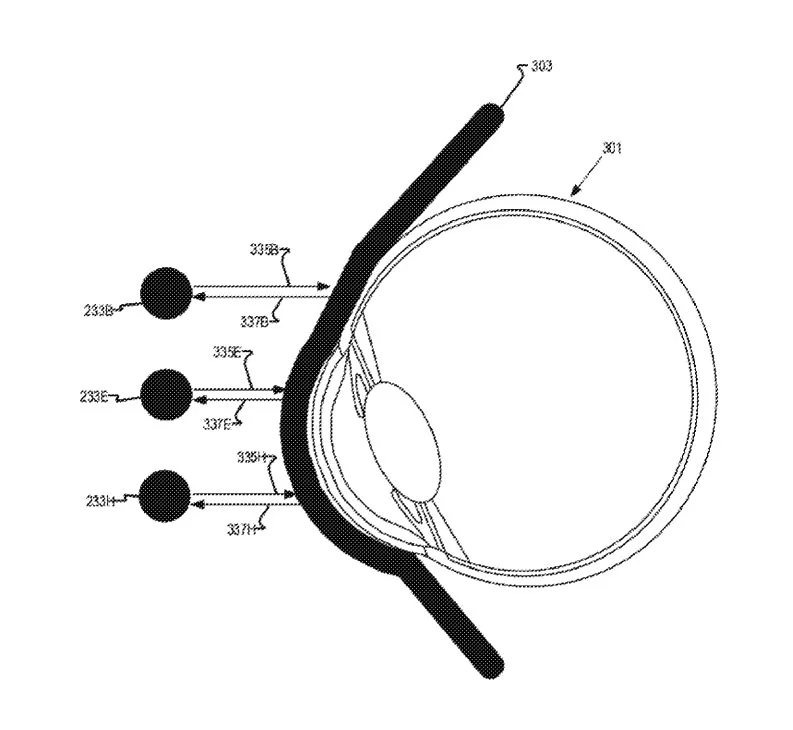
图3B示出了眼睛定位在不同方向的示例。传感器233E可以测量眼睑303的距离,而所述距离大于在图3A的测量到的距离,因为角膜的中心不再那么接近传感器233E。
在图3B中,传感器233H可以测量眼睑303的距离,而距离可以小于在图3A的前向方向测量的距离。
在图3B中,传感器233B测量可以眼睑303的距离,所述距离可以略大于在图3A的前向方向测量的距离。因此,可以根据传感器阵列233测量的到眼睑303的距离来确定眼睛方向位置。当然,其他距离测量将对应于眼睛301的前向位置和侧向位置。通过用传感器阵列捕获眼睑303的位置,可以检测REM睡眠状态。
Meta指出,专利描述的方法可以以一种轻量、廉价、低功耗和高舒适度的方式来检测快速眼动周期(REM)。同时,除了用于睡眠眼罩之外,这家公司表示发明可以以诸如VR这样的人造现实系统实现,或者结合人造现实系统进行实现。
相关专利:Meta Patent | Non-contact rapid eye movement (rem) monitoring
名为“Non-contact rapid eye movement (rem) monitoring”的Meta专利申请最初在2022年7月提交,并在日前由美国专利商标局公布。
......(全文 1009 字,剩余 0 字)








