微软AR专利提出面向盲人或低视力人群的空间锚点创建方案

帮助用户轻松创建空间锚点
(映维网Nweon 2023年01月04日)Spatial Anchors(空间锚点)表示存在于云中的物理点。对于增强现实应用,全息图可以附着到空间锚点。空间锚点的独特地方在于,它能够在云中存储和持久化,并在以后由创建它的设备或任何其他受支持设备进行查询。这能够实现锚点的云备份和基于云的锚点共享。
在用例方面,空间锚点是创建室内导航系统的关键技术。空间锚点可由支持使用空间锚点的设备重新检测。尽管用于创建稳健空间锚点的指南属于可视化形式,但通常要求用户在空间中寻找特定类型的特征,或者以从不同角度捕捉特定类型特征的方式在空间中移动。对于失明或视力低下的用户而言,创建空间锚点可能是一项挑战。
为了帮助用户轻松创建空间锚点,微软提出了一种面向所有人的引导系统,包括盲人或低视力人士。简单来说,可以通过语音和触觉反馈等方式来引导用户创建空间锚点。
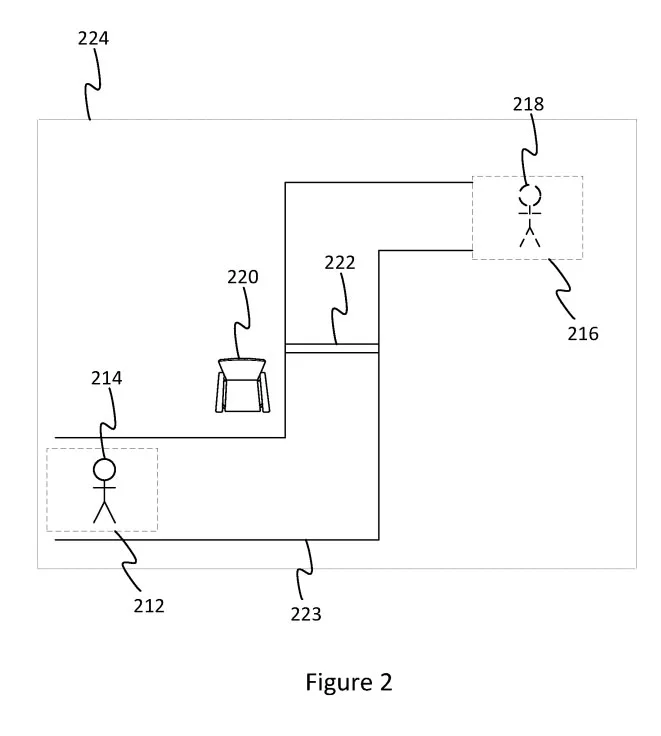
图2示出了真实世界区域224的示例平面图。用户214可以在真实世界区域224中的第一位置212开始。在映射到真实世界区域224的模型中,第一位置可以是空间锚点。模型中的空间锚点可用于向用户提供映射到真实世界区域224的起点或终点。
用户214可以从第一空间锚点214移动到第二空间锚点216。第二空间锚点216在模型中映射到真实世界区域224中的第二位置。
用户214可以使用诸如用户设备102、104a和104n的用户设备来从空间锚点212导航到空间锚点216。两个点之间的导航对应于用户214在真实世界区域224中移动以在映射到真实世界区域222的模型中相应地移动。
......(全文 3102 字,剩余 2546 字)











