微软AR/VR专利提出采用谐振LC传感器进行面部捕捉

利用谐振LC传感器感测表面,这样就无需集成摄像头
(映维网Nweon 2022年12月28日)诸如头显这样的可穿戴设备可以执行面部追踪并实现一系列的应用。然而,如果是采用摄像头的方法,这需要将摄像头集成到头显之中并影响视觉设计。另外,摄像头可能对遮挡敏感,例如面罩、头带和毛发等等。
所以在名为“Surface sensing via resonant sensor”的专利申请中,微软提出可以利用谐振LC传感器感测表面。由于LC谐振式传感器的敏感单元采用电感和电容组成,所以它具有结构简单、尺寸小、制造成本较低的优点,同时由于其具有可无线测量特性,因而特别适用于封闭环境下物理量的非接触式监测。通过这种方式,头显无需集成摄像头就能执行面部检测。
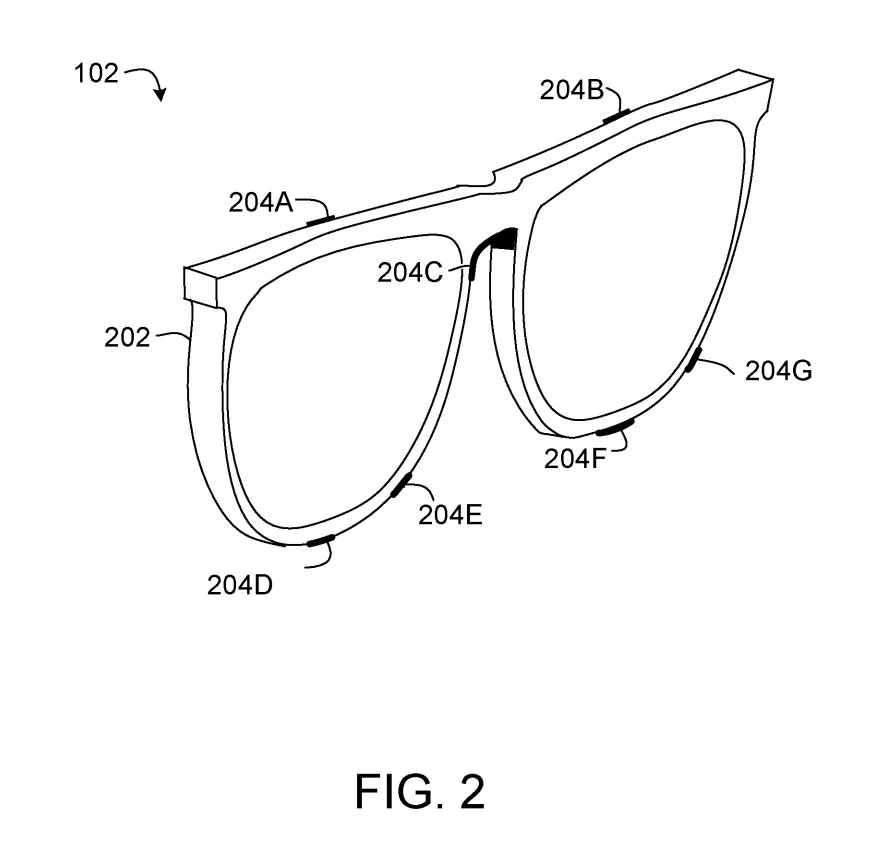
在一个实施例中,头显包括用于面部追踪的谐振LC传感器。如图2所示,头显框架202包括谐振传感器阵列,谐振传感器阵列包括空间分布在框架202的多个谐振LC传感器204A-G。每个谐振LC传感器204配置为感测接近相应传感器的面部表面。
每个传感器可以配置为感测面部的不同部分,例如左眉毛、右眉毛、鼻子等等。每个谐振LC传感器204配置为输出信号,并提供关于接近相应谐振LC传感器的面部位置信息。
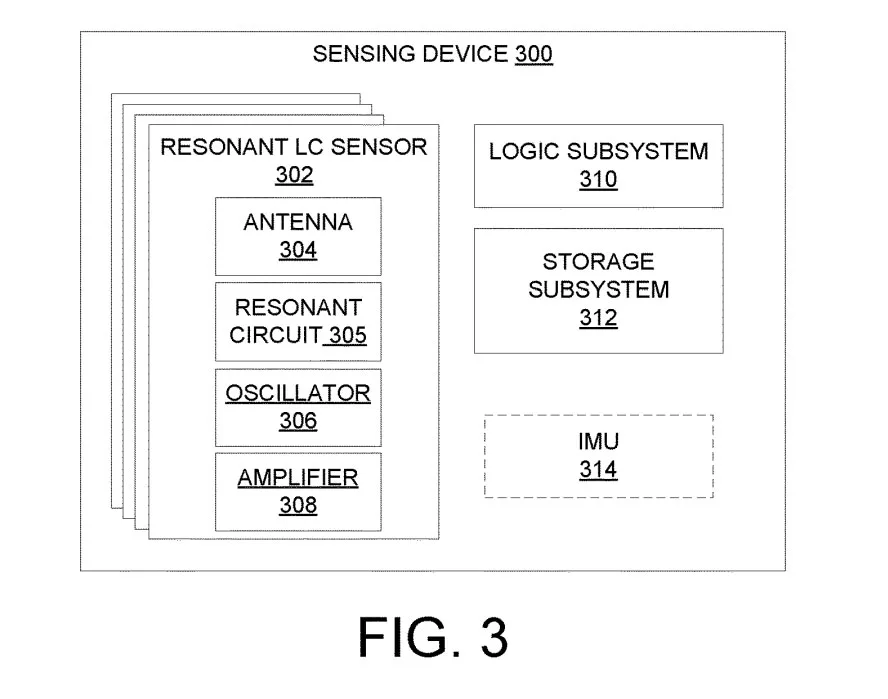
图3示出了示例感测设备300的框图。在一个实施例中,感测设备300可用于面部感测。在其他示例中,感测装置300可用于感测除面部之外的表面。
传感设备300包括多个谐振LC传感器302,每个谐振LC传感器配置为响应于接近相应谐振LC传感器的表面的位置而输出信号。每个谐振LC传感器包括天线304、谐振电路305(其中谐振电路305包括天线304的电容和/或电感与一个或多个其他电抗元件组合)、振荡器306和放大器308。
天线304配置用于近场电磁检测。振荡器306和放大器308配置为在天线产生振荡信号。振荡信号选择为稍微偏离谐振LC传感器的目标谐振频率。
感测设备300同时包括逻辑子系统310和存储子系统312。在头显示例中,逻辑子系统310可以执行存储在存储系统312中的指令,以控制每个谐振LC传感器302,并基于从每个谐振LC检测器302接收的信号来确定关于表面的信息。
存储在存储子系统312中的指令可以配置为使用经过训练的机器学习功能(例如神经网络)将传感器输出映射到面部姿态。机器学习功能使用针对多个用户中的每个用户的多个不同面部姿态的每个标记传感器数据进行训练。
在一个实施例中,感测设备300同时可以包括可选的惯性测量单元(IMU)314。来自IMU 314的IMU数据可用于检测感测设备的位置变化,并可帮助区分设备运动与被感测表面的运动。
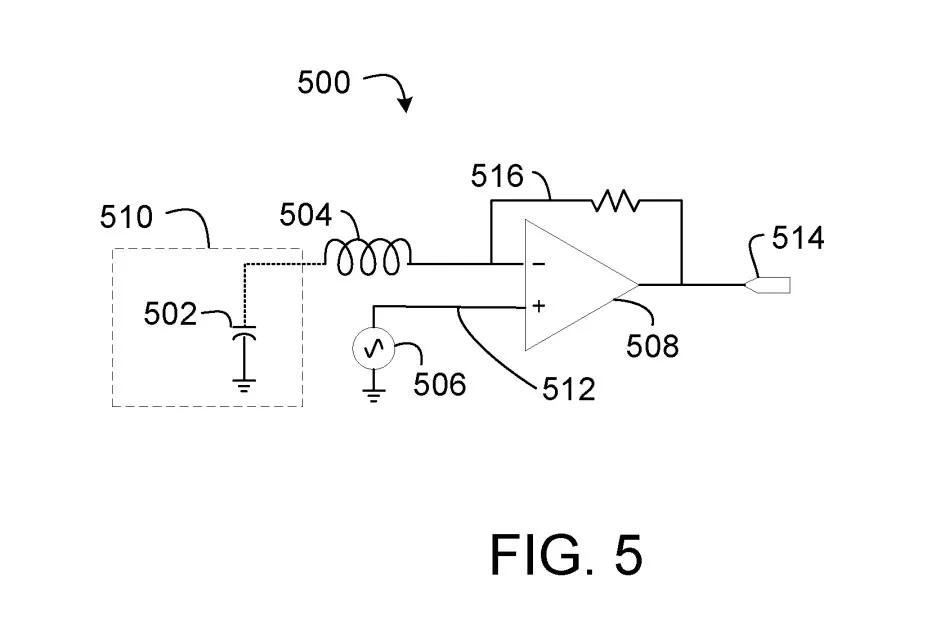
图5示出了示例谐振LC传感器500的电路图。谐振LC传感器500可以用作例如图3的感测设备300中的谐振LC传感器。谐振LC传感器500包括电感器504、振荡器506、放大器508和天线510,天线包括由电容器502表示的电容。振荡器506配置为在节点512上输出驱动信号,放大器508配置为基于经由反馈环路516在节点512处接收的驱动信号在天线中生成振荡信号。
天线510的电容502和电感器504形成串联谐振器。天线510的电容是接近天线510的表面的函数,因此基于接近传感器的表面的位置的变化而变化。
电容器502的电容变化改变串联谐振器的谐振频率,这可以被感测为在输出节点514处检测到的传感器输出的相位和振幅中的一个或多个的变化。在一个实施例中,可以包括单独的电容器以向谐振电路提供附加电容,例如,将谐振电路调谐到选定的谐振频率。
如前所述,感测表面与谐振LC传感器的接近度改变谐振LC传感器近场响应,这可以被检测为谐振LC传感器在选定频率下的相位和/或振幅的变化。相位信息涉及LC谐振传感器的振荡器与谐振LC传感器的LC谐振电路上的近场响应之间的相位关系。
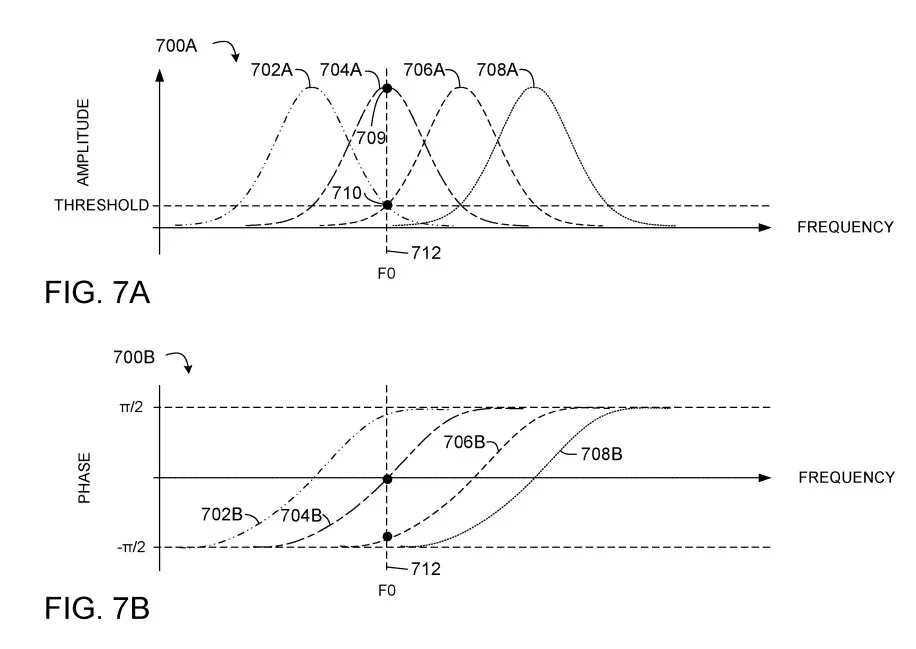
图700A和700B示出了串联谐振LC传感器(例如传感器500)对信号702、信号704、信号706和信号708这四个不同表面接近度的响应,其中后缀a(例如702A)表示振幅,后缀B(例如702B)表示相位信息。
不同表面接近度的输出信号在所选振荡器频率f0处具有不同的相关相位和振幅。例如,表示第一表面接近度的信号702包括作为频率的函数的相关联的振幅图702A和作为频率的功能的相关联相位图702B。类似地,信号704、706和708包括不同的相关振幅和相位图,每个对应于不同的表面接近度。
例如,信号708可以对应于在选定频率712处检测范围之外的表面接近度。所示示例中的检测范围对应于输出信号幅度值大于或等于所选频率处的阈值的范围,如710所示。
信号702A和信号706A都具有等于所选频率处的阈值的幅度值,并且表示在检测范围内的信号中心频率的范围。任何合适的频率都可用作振荡器输出的选定频率。
在一个实施例中,谐振LC传感器可以配置为具有100KHz至1MHz范围内的谐振频率,并且所选择的频率充分接近谐振频率,从而基于谐振LC传感器的谐振频率的变化来检测表面运动。
信号702在谐振LC传感器的电感范围内,并且对应于支配串联谐振器的电感。相反,信号706在LC谐振传感器的电容范围内,对应于支配串联谐振器的电容。
从这图中可以看出,当表面接近度在所选频率的任一侧的检测范围内产生谐振频率时,谐振LC传感器的电容或电感状态内的信号对邻近表面的位置变化敏感,并且可以通过测量在所选频率下输出的信号的振幅和相位中的一个或多个来检测位置的变化。
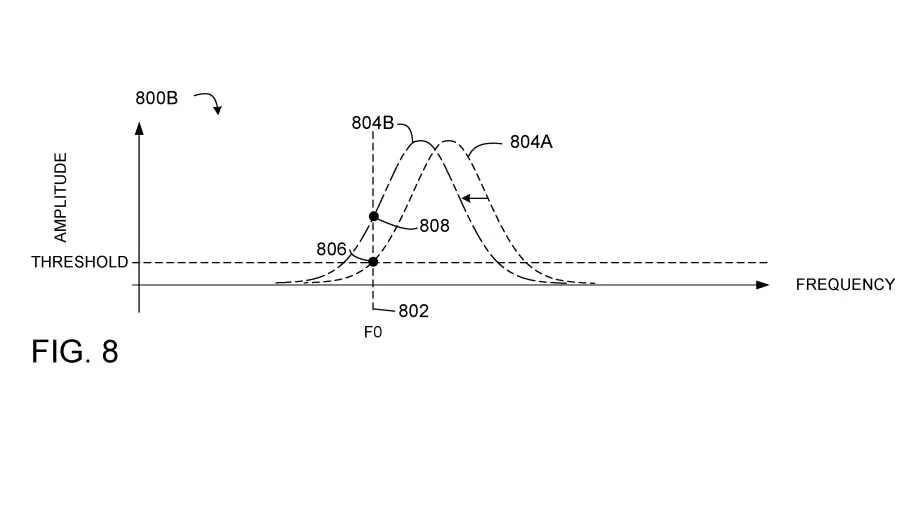
图8示出了当接近谐振LC传感器的表面相对于传感器移动时,谐振LC传感器在选定频率下输出的信号的振幅的变化。在示例中,靠近谐振LC传感器的面部移动使幅度信号的中心频率朝着所选频率移动,如迹线804A和804B所示,导致808处的信号幅度在所选频率处增加。
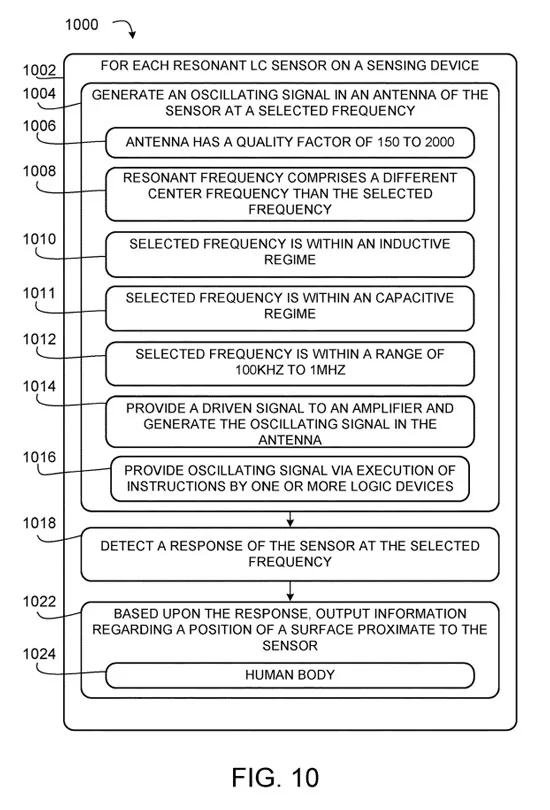
图10示出了用于感测谐振LC传感器附近表面的示例方法1000。
在1004,在谐振LC传感器的天线上以选定频率产生振荡信号。
在1016,可以通过一个或多个逻辑设备执行存储的软件和/或固件指令将振荡信号提供给天线。
在1018,检测谐振LC传感器在选定频率下的响应。
在1022,基于谐振LC传感器的响应,输出关于接近传感器的表面的位置的信息。
名为“Surface sensing via resonant sensor”的微软专利申请最初在2021年6月提交,并在日前由美国专利商标局公布。需要注意的是,目前不确定所述技术的具体应用效果。
......(全文 2108 字,剩余 0 字)











