微软专利探索用外设眼镜盒帮助AR眼镜执行高精度深度测量

利用外设(眼镜盒)来帮助诸如AR眼镜等设备执行高精度深度测量的方法
(映维网Nweon 2022年12月19日)深度感知数据对于AR/VR设备非常重要。例如,AR头显主要利用深度信息来显示关于真实世界环境的全息图。例如,AR头显可以利用飞行时间(ToF)或结构光深度摄像头等直接测量深度传感器来测量到环境物体的距离。然而,由于ToF摄像头或结构光深度摄像头可能比感测二维强度图像的摄像头更大,所以采用诸如眼镜等较小形状参数的其他头戴式设备会采用立体摄像头布置,亦即定位在间隔开位置的一对二维摄像头,并通过执行三角测量来确定深度。
然而,立体深度测量对立体摄像头的位置和取向的变化敏感,一个摄像头相对于另一个摄像头的位置和/或方向的偏差可能导致错误的深度测量。
在名为“Depth sensing via device case”的专利申请中,微软就提出一种利用外设来帮助诸如AR眼镜等设备执行高精度深度测量的方法。有趣的是,微软描述的外设可以是用来装AR眼镜的眼镜盒。换句话说,用于装AR眼镜的眼镜盒可以搭载一系列的传感组件,并作为一种外设捕获深度信息。例如下面的图6所示。
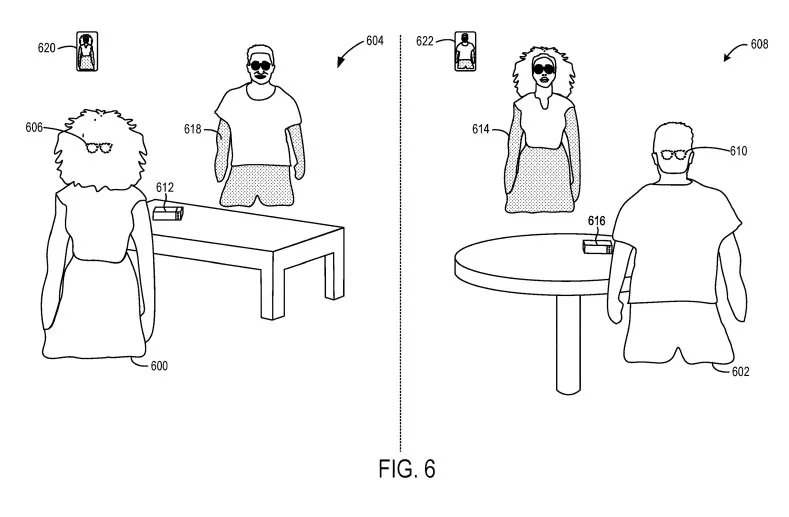
图6示出了第一用户600和第二用户602参与全息通信会话的场景。第一用户600位于第一真实世界环境604中并佩戴第一AR眼镜606。第二用户602位于第二真实世界环境608中并佩戴第二AR眼镜 610。
用于第一AR眼镜606的第一外设612定位为捕获包括第一用户600的深度图像的深度数据,以及包括第一用户的可见图像的纹理数据,纹理数据映射到深度数据,使得纹理数据可以应用到深度数据以生成第一用户614的全息图,并经由第二AR眼镜610显示给第二用户602。
用于第二AR眼镜610的第二外设616同理,使得第一AR眼镜610可以显示第二用户602的全息图。
......(全文 1836 字,剩余 1213 字)











