微软研究团队分享:用数据集LaMAR开发AR场景定位、映射算法

通过增加面部landmark的数量来实现更精确的3D面部重建
(映维网Nweon 2022年10月27日)计算机视觉是计算机科学中最引人注目的领域之一。它的发展速度非常迅速,并且有望显著影响人们的生活和工作方式。近年来,机器学习和计算机视觉的融合交叉进展正在加速,并为众多领域带来了重大进展,包括医疗保健、机器人、汽车工业和增强现实。
为了帮助人们实现更多目标,微软研究人员一直在与所述领域的学者和专家合作,共同开展一系列的计算机视觉项目。一个例子是PeopleLens。这款以HoloLens作为灵感的头戴式设备可以通过空间化音频识别周围的人员,从而帮助失明人士或视力低下人士在社交场合进行互动。另一个例子是Swin Transformer。这个计算机视觉架构在目标检测中实现了高精度,并提供了将计算机视觉和自然语言处理(NLP)架构统一的机遇。
在日前举行的2022年欧洲计算机视觉大会(ECCV),微软介绍了团队在计算机领域的最新成果。下面将重点与混合现实相关的两份研究论文。第一篇是通过增加面部landmark的数量来实现更精确的3D面部重建,在降低所需计算能力的同时获得最先进的结果。另一篇主要涉及一个利用AR设备对真实世界进行视觉定位和映射的数据集。以下是第二篇“LaMAR: Benchmarking Localization and Mapping for Augmented Reality”的分享。
为了充分发挥增强现实的潜力,任何头显用户都应该能够将虚拟内容放置在物理世界中,与他人共享,并期望虚拟内容能够随着时间的推移而保持在原处。但是,在AR设备以全息图形式增强现实世界之前,它们需要构建物理3D世界的数字映射。然后,设备需要相对于所述映射进行定位或重新定位。这允许它们检索先前放置的全息图并在指定位置向用户显示。实现所述功能的计算机视觉基础称为映射和视觉定位。
通常,视觉定位的研究集中在单个图像,一般是精心挑选的著名景点的视图。但这并不能反映真实的AR场景。AR设备可以本地映射环境,并提供空间配准序列,而不是单个图像。这种序列同时可以包括其他数据,如来自传感器的惯性信号或无线电信号。然而,使用这样的序列进行定位非常具有挑战性,因为它们通常只是在正常设备使用过程中收集,而且并不旨在促进定位。
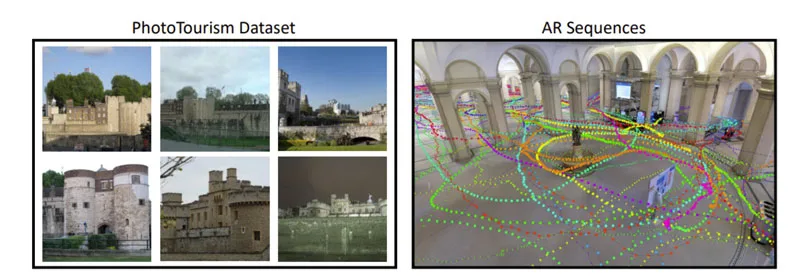
为了弥补这一差距,微软引入了一个全新的基准。这是微软一个专注于AR的设置,并明白到视觉重新定位是共享性和持久性AR体验的关键要素。考虑到典型AR场景的空间尺度,例如导航机场或检查工厂,团队必须设计一条能够自动计算各种现成AR设备(如HoloLens或iPhone)捕获真实AR序列的ground truth摄像头位置的管道。通过在所述基准评估最先进的方法,研究人员对当前研究提供了新的见解,并为AR视觉定位和映射领域的未来探索提供了途径。
......(全文 2180 字,剩余 1186 字)











