谷歌研究:仅用头显完成全身动捕、环境光照恢复与可重光照化身渲染

仅用头显完成全身动捕、环境光照恢复与可重光照化身渲染
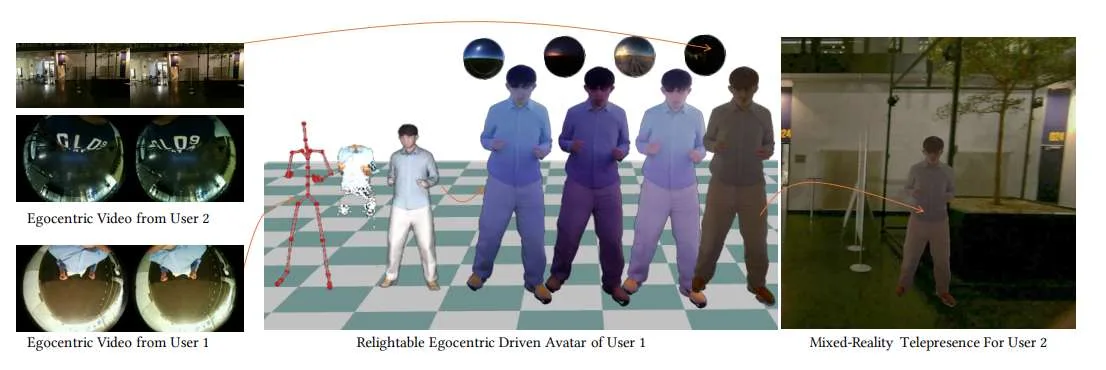
(映维网Nweon 2026年06月02日)德国马普信息学研究所和谷歌等机构的研究人员开发了一套名为EgoRelight的系统。它针对头戴式显示器头显设计,并利用了设备原有的朝下立体摄像头和朝前摄像头,以同时完成:
-
从朝下摄像头估计用户的全身动作与稠密深度图,并驱动基于网格的化身几何;
-
根据目标光照渲染出与视角相关的镜面反光和漫反射阴影,生成可重光照的逼真化身;
-
通过朝前摄像头扫描环境,经过逆向渲染和颜色校准,恢复出HDR环境贴图,使化身的着色与真实环境一致。
换句话说,这个设备可以在同一框架内支持自中心全身动捕、逼真人体重光照以及环境光照恢复,且仅依赖一个头显,无需外部摄像头或复杂演播室设备。
......(全文 1151 字,剩余 858 字)











