VR触觉训练研究:改变虚拟弹簧的力反馈或能帮助训练精细力控制

改变虚拟弹簧的力反馈或能帮助训练精细力控制
(映维网Nweon 2026年06月01日)荷兰代尔夫特理工大学、伊拉斯姆斯大学鹿特丹等机构的新研究发现,通过改变虚拟弹簧的力反馈特性,可以在训练过程中提升健康人生成精细力的能力。这为中风后康复训练中如何更有效地调动患者的体感系统提供了新思路。
中风后,许多患者会出现体感功能损伤,难以整合本体感觉和触觉信息,这直接影响到他们控制力量的能力,例如抓握、提起物品等日常动作。然而,目前的神经康复干预大多集中在运动功能的恢复上,体感引导下的精细力量控制常常被忽略。
研究团队提出,利用虚拟现实技术和机器人触觉设备,并改变虚拟物体的动力学特性,或许能主动调动患者的体感系统,训练其精确生成力量的能力。
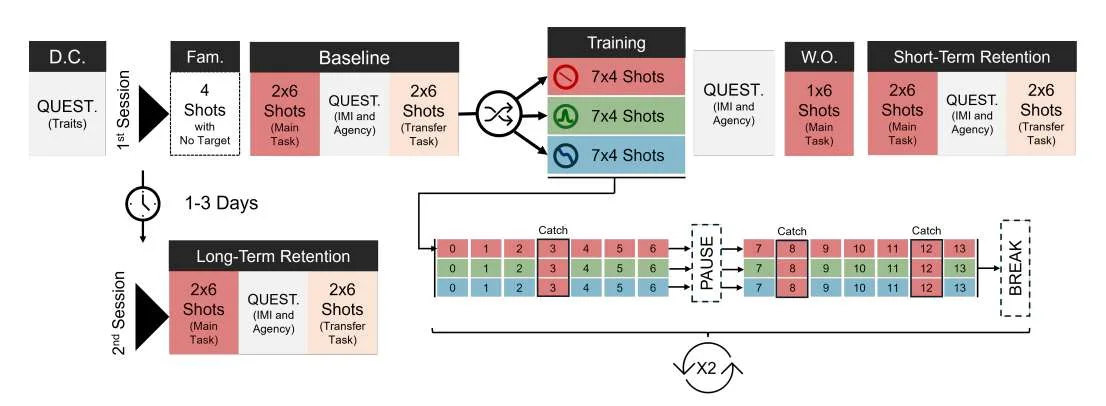
50名健康被试参与了一项类似冰壶的虚拟任务。他们需要拉动一个由机器人设备渲染的虚拟弹簧,在适当的时机释放,使虚拟石壶滑行至冰面目标中心。石壶的滑行距离由释放瞬间弹簧产生的力决定。
在训练阶段,参与者被随机分为三组,分别体验三种不同力反馈特性的虚拟弹簧:
......(全文 898 字,剩余 487 字)








