映维日报:PICO OS 6向开发者开放,Meta元宇宙社交Horizon Worlds宣布不再支持VR

本日报由AI生成,可能存在信息错误,具体可查看原文。

◐ PICO OS 6正式向开发者开放,Project Swan模拟器同步上线
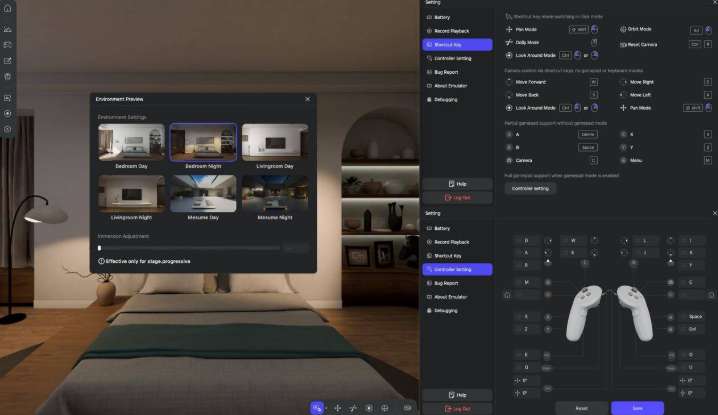
PICO 正式上线 PICO OS 6 开发者预览版,该系统依托 Project Swan 设备,将桌面多任务升级为空间计算体验,基于全新的 PICO Spatial Engine 统一渲染实现 2D+3D 空间多任务,支持眼手交互、外接设备等多种交互方式,还兼容安卓应用、PCVR 等多类应用生态和开发方式,提供独占空间、共享空间两种模式,同时开放了完整的开发者 SDK 和文档,推出全新 PICO Emulator 助力开发者无设备开发测试,开发者可前往 PICO 开发者官网了解相关开发平台,参与下一代空间应用的开发。
◐ 开发者称已破解PSVR 2的PC限制,解锁眼动追踪和触觉反馈功能
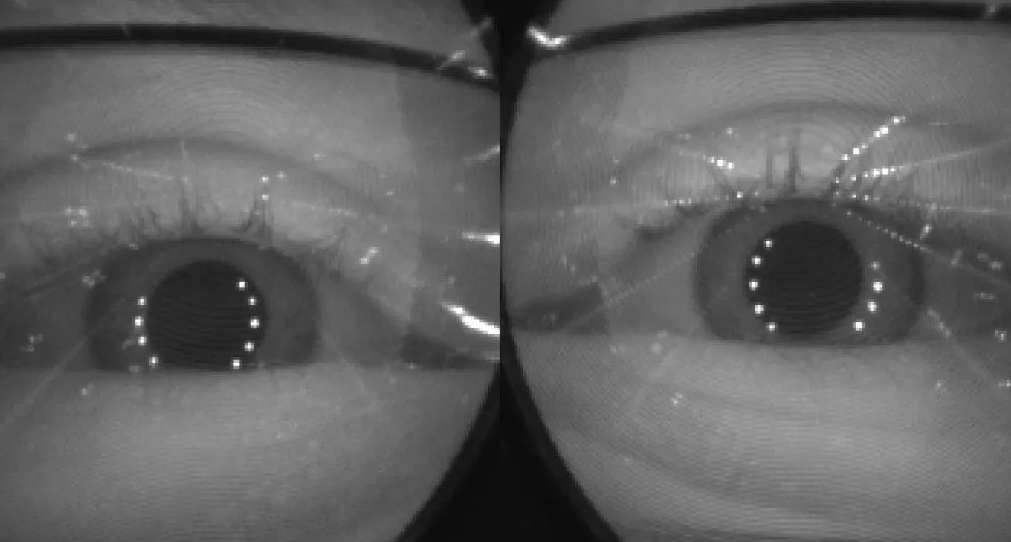
开发 PSVR2Toolkit 的硬件黑客团队宣称已破解 PSVR 2 的 PC 使用限制,目前已能在 PC 端启用该头显的震动和眼动追踪摄像头数据流,这项研究耗时 5 个月,团队还计划尽快发布相关成果供用户体验。索尼 2024 年推出的 PSVR 2 PC 适配器虽让其摆脱 PS5 独占,但屏蔽了眼动追踪、HDR 等硬件功能,此前相关工具仅实现了部分功能且存在集成缺陷,此次破解有望实现摄像头全访问、HDR 渲染管道等更多功能,而该成果能否顺利普及还取决于索尼的态度。
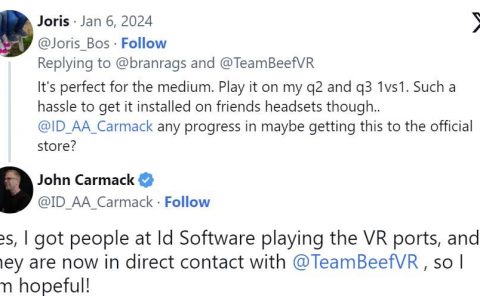
◐ Meta宣布Horizon Worlds于本月底从Quest下架,不再开放VR端访问

Meta 宣布调整 Horizon Worlds 相关策略,该应用 VR 版将于 3 月 31 日从 Quest 商店下架,用户无法在 VR 端访问相关世界,6 月 15 日起还将正式从 Quest 头显中移除,此后所有世界均无法通过 VR 模式进入,用户可通过网页端和 Meta Horizon 智能手机应用以平面屏幕体验该应用,Meta 也会持续开发移动端体验。同时 Meta 表示虽将 Horizon Worlds 全面转向移动端,但仍会加大对 VR 的投入,后续将专注于支持第三方开发者社区,通过建立合作、定向投资等多种方式助力其发展。
◐ 英伟达:CloudXR 6.0原生登陆visionOS,RTX算力直通Vision Pro

英伟达宣布与苹果合作,将 CloudXR 6.0 原生集成到 visionOS 26.4 系统,可把 NVIDIA RTX 算力直通 Apple Vision Pro,实现高保真模拟器、专业 3D 设计应用及沉浸式游戏的安全传输,具备 4K 分辨率、低延迟等特点,还通过注视点流式传输技术优化渲染并保护用户隐私。该技术可应用于汽车设计评审、数字孪生工厂、医疗实验室仿真等行业,Autodesk、Innoactive 等多家软件商及起亚、宝马、罗氏、富士康等企业已借助该技术优化工作流程,同时也能支持《X-Plane 12》《iRacing》等模拟器游戏,CloudXR 6.0 已向开发者提供,visionOS 26.4 及相关应用将于当年春天推出。
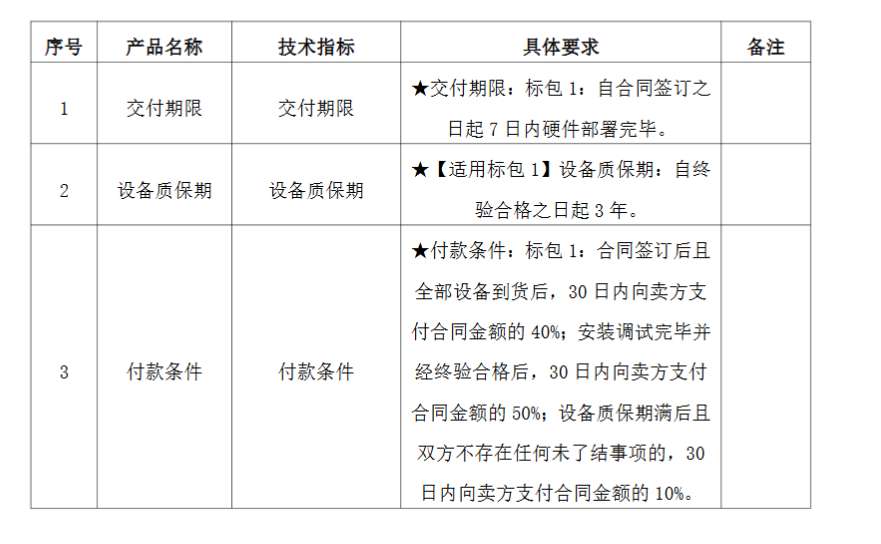
中国电信股份有限公司台州分公司发布公告,计划以约 177 万元开展天台卫健 AR 设备及服务二期采购项目,项目分为 AR 终端设备采购和 AR 配套系统服务采购两个标包,分别设定预算、最高限价、交付及质保要求,每个标包确定 1 家成交供应商。公告明确了供应商的基本资格、信用、产品等方面要求,不接受联合体响应,允许符合条件的代理商参与,采用资格后审方式。项目询比文件可在规定时间内通过中国电信阳光采购网免费申领,响应文件需在 2026 年 3 月 27 日前通过该系统加密提交,同时公布了供应商注册、CA 证书办理、技术支持及异议接收等相关事项和联系方式。
湖南天择城旅文化科技有限公司拟投入 140 万元自筹资金开展 VR 设备采购及体验空间搭建项目,该项目已具备招标条件并开启招标。项目划分为 1 个标段,招标方明确了投标人需满足的基本资格、信用等方面要求,不允许联合体投标,同时列明了投标人须提供的各类资格证明文件。此外,公告还公布了招标文件的获取时间、方式及费用,投标文件的递交截止时间与方式,以及项目的开标时间、地点,同时给出了招标人和招标代理机构的地址、联系人、联系电话等联系方式。
◐ VRGaussianAvatar:用一张照片生成3D虚拟人,实现实时VR驱动
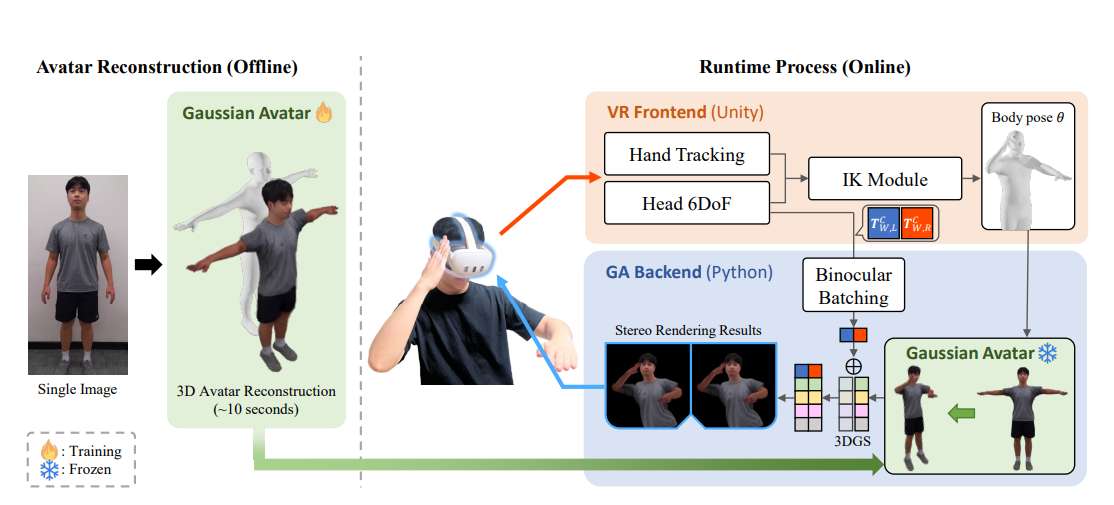
韩国科学技术院与苏黎世联邦理工学院等机构的研究团队推出 VRGaussianAvatar 方案,解决了传统 3D 虚拟人生成流程复杂、效果不佳的问题,该方案仅需一张普通正面全身照,10 秒内就能构建还原面容和衣着细节的 3D 高斯飞溅模型,还能依靠商用 VR 头显内置传感器,通过算法推算全身姿态实现虚拟人实时驱动,无需额外设备。团队还提出双目批处理策略降低 VR 渲染计算负担,让系统达到 VR 交互的实时性要求,方案采用前后端分离架构保障交互实时性且便于后期升级。经实验对比,该方案生成的虚拟化身在相似度、动作自然度等多项指标上显著优于主流网格建模方案,获得参与者认可。目前该系统尚未集成面部表情和眼球追踪,研究团队后续将结合面部控制技术优化,并探索轻量模型以实现 VR 一体机独立运行。
◐ 户外VR研究:毫米波雷达让虚拟与现实共存,还能保护路人隐私
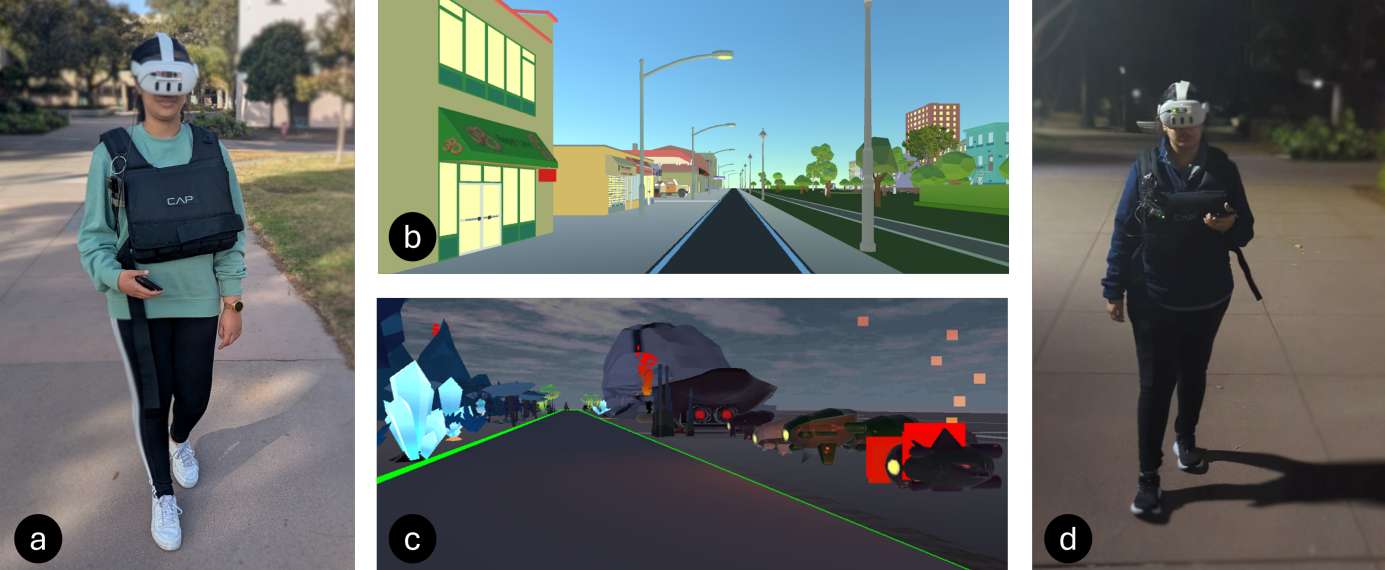
针对户外 VR 面临的避障和隐私保护难题,美国加州大学圣巴巴拉分校研究团队开发出基于毫米波雷达的户外 VR 系统 WaveWalkerClone,该系统以毫米波雷达替代摄像头,结合 GPS 和惯性测量单元定位,能检测 8 米内障碍物且不记录图像信息,从源头保护路人隐私,还解决了传统摄像头在特殊环境下失灵、追踪范围有限的问题。研究团队在校园路段开展实验,让志愿者在虚拟外星环境中行走并设置真实障碍物,将障碍物以叙事性外星人化身、非叙事性人类化身、抽象点云三种方式在 VR 中呈现,实验发现三种方式均能保障行走安全,但在及时性、操作难度、体验感受和用户偏好上各有差异,研究人员指出未来户外 VR 系统可灵活组合多种可视化方式,同时设计时需保证感知与显示同步,且叙事性形象设计要规避误导用户的问题。