博世开发LFI激光眼动追踪技术用于智能眼镜

激光反馈干涉测量(LFI)传感器
(映维网Nweon 2025年08月08日)智能眼镜正在成为一类全新的可穿戴设备。尽管智能眼镜潜力巨大,但其自然交互方式有限。注视追踪提供了一个富有前景的解决方案,允许用户使用他们的眼睛与设备和周围环境进行交互。然而,当前的视频视觉(VOG)系统面临着诸如高功耗、笨重的传感器以及在不同照明条件下鲁棒性降低等挑战。
为了解决上述问题,博世团队提出激光反馈干涉测量(LFI)传感器作为VOG的替代方案。
作为说明,激光反馈干涉测量(Laser Feedback Interferometry/LFI)是一种基于激光器内部光场受到外部目标反射光反馈影响而产生特性变化的高精度位移、振动、速度等物理量测量技术。它以其结构简单、灵敏度高、非接触、自准直等优点在精密测量领域备受关注。
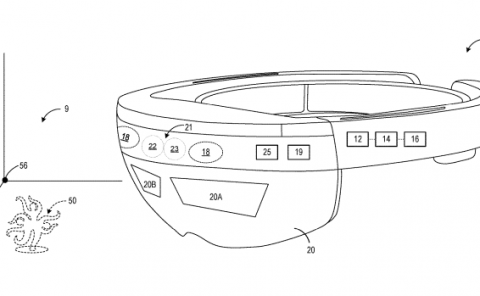
LFI传感器在尺寸、功率效率和环境光稳健性方面具有优势。所提出的LFI眼动追踪传感器可无缝集成到轻型眼镜中,不需要用户特定的校准,并且可以连续全天使用。为了确保在瞳孔间距不同的大范围用户中进行可靠的追踪,团队采用了覆盖更宽眼睛区域的细长激光束。这种设计通过准确地捕获用户的注视矢量来提高追踪精度,同时在不同的光照条件下保持鲁棒性。
......(全文 2332 字,剩余 1893 字)
 请微信扫码通过小程序阅读完整文章或者登入网站阅读完整文章
请微信扫码通过小程序阅读完整文章或者登入网站阅读完整文章
映维网会员可直接登入网站阅读
PICO员工可联系映维网免费获取权限