弗吉尼亚理工团队开发PRIMO技术实现VR多尺度缺陷检测

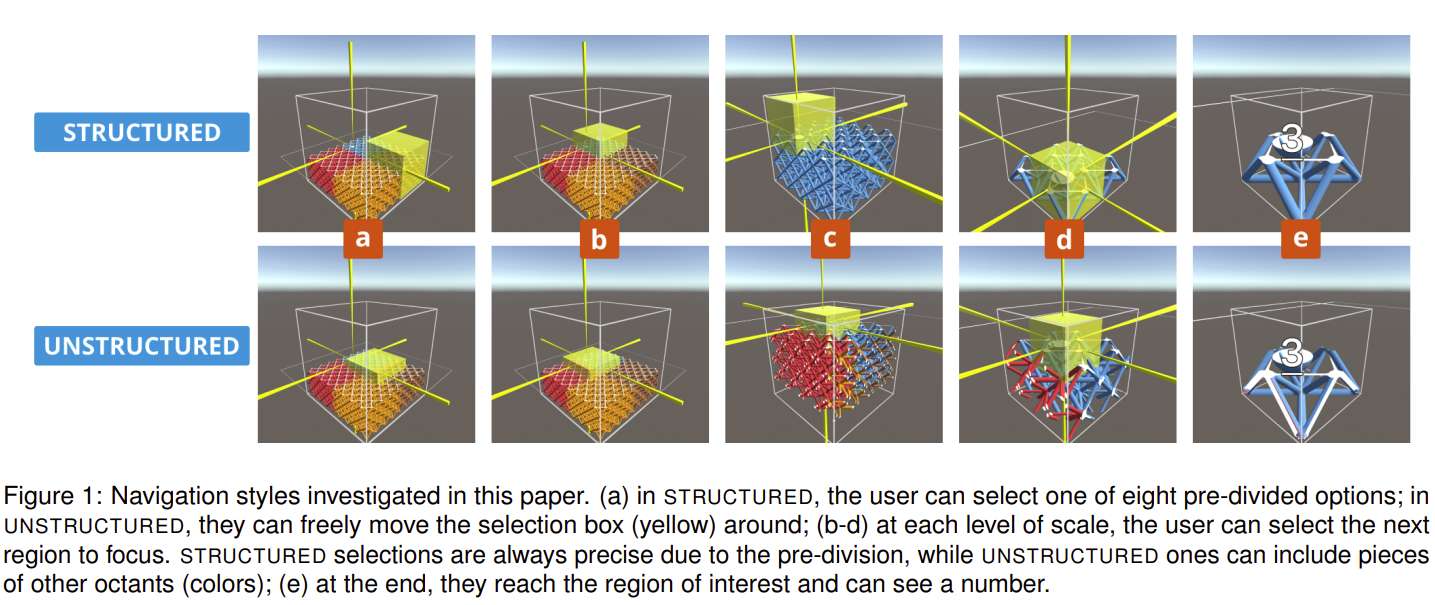
结果表明,非结构化导航可以比结构化导航快,只显示选中的部分可以比显示整个对象快。然而,使用显示一切模式可以支持更好的位置感知和对象理解。
(映维网Nweon 2025年05月29日)在虚拟现实中,在大而密集的物体中定位小特征是一个重大的交互挑战。尽管现有的多尺度技术支持不同级别尺度之间的转换,但它们并不专注于处理具有隐藏特征的密集、同构对象。
在一项研究中,美国弗吉尼亚理工大学和劳伦斯利弗莫尔国家实验室团队提出了一种新颖的方法,将渐进式细化的概念应用于VR导航,并实现集中检查。
他们进行了一项用户研究,在设计中改变了两个独立的变量,以更好地了解它们对多尺度导航的效率和意识的影响。结果表明,非结构化导航可以比结构化导航快,只显示选中的部分可以比显示整个对象快。然而,使用显示一切模式可以支持更好的位置感知和对象理解。
......(全文 1591 字,剩余 1257 字)
 请微信扫码通过小程序阅读完整文章或者登入网站阅读完整文章
请微信扫码通过小程序阅读完整文章或者登入网站阅读完整文章
映维网会员可直接登入网站阅读
PICO员工可联系映维网免费获取权限