麻省理工创新3D扫描技术,模糊激光雷达联合RGB攻克弱光环境重建难题

在具有挑战性的环境中实现具有准确颜色和几何估计的鲁棒3D扫描
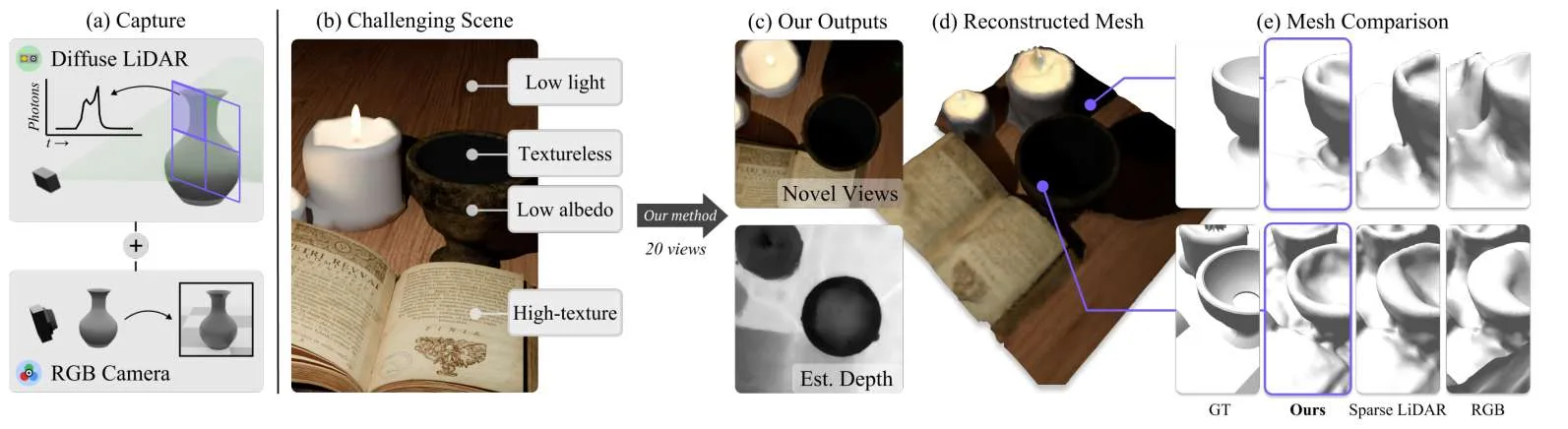
(映维网Nweon 2025年04月29日)三维表面重建在虚拟现实等应用中十分重要。然而,在低纹理、低光照和低反照率的场景中,基于RGB的重建往往失败。激光雷达现在十分常见,但有限的输入视图难以覆盖所有场景。
在一项研究中,麻省理工学院团队提出使用发出漫射闪光的“模糊”激光雷达,以大大提高场景覆盖范围。但它会在宽视场范围内引入混合飞行时间测量的空间模糊性,所以为了处理歧义,可以利用漫射激光雷达与RGB的互补优势。
研究人员引入了一个基于高斯曲面的渲染框架,它具有场景自适应损失函数,可以动态平衡RGB和漫射激光雷达信号。实验证明,漫射激光雷达可以优于传统方案,并在具有挑战性的环境中实现具有准确颜色和几何估计的鲁棒3D扫描。
......(全文 1501 字,剩余 1191 字)








